12 September 2020 : Clinical Research
Radiological and Clinical Differences between Tinavi Orthopedic Robot and O-Arm Navigation System in Thoracolumbar Screw Implantation for Reconstruction of Spinal Stability
Jinpeng Du1CDE, Lin Gao1BE, Dageng Huang1CD, Lequn Shan1BC, Wentao Wang1BF, Yong Fan1BF, Dingjun Hao1G, Liang Yan1AG*DOI: 10.12659/MSM.924770
Med Sci Monit 2020; 26:e924770






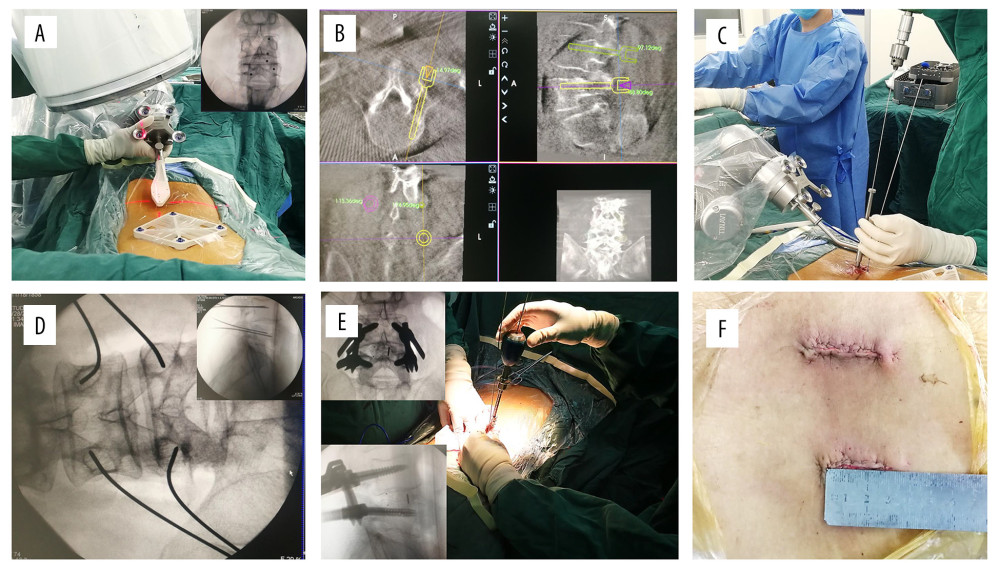
Figure 2 Surgical workflow of the robotic system assistance. (A) Locate positioning ruler at the position of target vertebra, reconstruct 3D images by 3D C-arm and upload them to workstation; (B) Design the best virtual screw trajectory on 3D image; (C) The electric drill is implanted with the guiding pin along the direction of the guiding cannula; (D) C-arm fluoroscopy to determine the position of the guiding pin; (E) The pedicle screw is placed along the pin, and then verified by fluoroscopy again; (F) Postoperative wound.