07 July 2024: Clinical Research
Edible Bite Force Sensor: A Novel Approach to Measuring Bite Force in Biomedical and Dental Applications
Lazar MilićDOI: 10.12659/MSM.944050
Med Sci Monit 2024; 30:e944050






Abstract
BACKGROUND: Measurement of bite force plays a crucial role in assessment of the masticatory system. With a growing interest in detecting occlusal irregularities, bite force sensors have garnered attention in the biomedical field. This study aimed to introduce a hydrogel bite force sensor, based on hydroxyethyl-cellulose-fructose-water (HEC-F-water), for premolar and molar teeth, and to evaluate it using optical profilometry, infrared spectroscopy (FTIR), and Instron Tension testing system, with 2.5 cm (1 inch) margins at top, bottom, right, and left.
MATERIAL AND METHODS: We fabricated 20 HEC-F-water hydrogel samples sized with surface of 1×1 cm, with 2 different widths – 1 mm and 5 mm. The samples were characterized using optical profilometry and FTIR and their electrical characteristics were determined using an impedance analyzer. Aluminum (Al) electrodes, fabricated using Cutting Plotter, were used to form a HEC-F-water-based transducer, which was used for bite force sensing. The Instron tensile testing system was employed, utilizing 3D printed models of the upper and lower jaw, to simulate biting. Forces in the range between 40 N and 540 N were exerted upon the transducer, and the output change in the electrical signal was measured.
RESULTS: The study determined the transfer function between bite force and capacitance. The fabricated sensor exhibited a sensitivity of 3.98 pF/N, an input range of 500 N, output range of 2 nF, and accuracy of 95.9%.
CONCLUSIONS: This study introduces an edible bite force sensor employing an edible hydrogel as a dielectric, presenting a novel avenue in the development of edible sensorics in dentistry.
Keywords: Biocompatible Materials, Bite Force, Edible Films, Oral Health, Hydrogel Film, Humans, Hydrogels, Molar, Fructose, Mastication, Spectroscopy, Fourier Transform Infrared, Cellulose, Water, Bicuspid
Introduction
In recent years there has been growing interest in development of bite force sensors in biomedical engineering [1]. Human bite force is the force applied by the masticatory muscles in dental occlusion [2]. It is the result of all the forces acting on individual teeth due to various components of the masticatory system. The magnitude of bite force reflects the coordination between the upper and lower jaws, teeth, temporomandibular joint, and muscular system [3]. Bite force is used to investigate various aspects related to the dentition, occlusal factors, dentures and implant therapy, temporomandibular diseases, orthognathic surgery, and neuromuscular modifications [4]. It is also used to evaluate the therapeutic effects of prosthodontic devices [5].
Bite force sensors can be used to improve the diagnosis and treatment of oral diseases. The development of wireless bite force measurement devices allows for more accurate and quantitative measurement methods, helping dentists find effective strategies for treating occlusal diseases [6]. Additionally, wearable bite force measurement systems, such as mouthguard-type sensors, provide valuable monitoring of bite force in conditions like bruxism [7]. Furthermore, the use of electrochemical sensing technology in bite force detection allows for non-invasive and speedy diagnosis of common oral diseases [8–10].
Over the years, a range of devices with different designs and working principles have been used to measure bite force. These devices can be either mechanical, electrical, or a combination of both [11]. Mechanical devices were the earliest form, with the first device, called the gnathodynamometer, being developed in the 17th century [12]. Later, other devices were invented or modified, including lever-spring, manometer spring and lever, and micro metered devices [13]. Currently, electronic devices are commonly used due to their accuracy and precision. These devices utilize load cells (transducers) to convert force into electrical energy, and they can measure a wide range of forces (50–800 N), with an accuracy of 10 N and a precision of 80% [14]. Advancements in sensor technologies have paved the way for development of more sophisticated and reliable bite force sensors that provide quantitative data on the magnitude and distribution of forces during biting and enable precise evaluation and diagnosis of various orofacial conditions [6,7,15–17]. The use of wireless bite force measurement devices with stress sensor systems has shown promise in diagnosing and treating occlusal diseases [6]. Depending on the effect used to convert force information into interpretable signals, force sensors are divided into converters that utilize the piezoresistive effect, piezoelectric effect, strain gauge converters, pressure detectors, and pressure-sensitive thin films [13]. In addition to these types of force sensors, capacitive force sensors are also commonly used [14,18–20].
Bite sensors commonly use a variety of materials. One common material is a hydrogel and a dielectric elastomer, which can easily conform to the surfaces of teeth and capture dynamic bite forces [18]. These biomaterials are biodegradable and sustainable [21]. Additionally, sensors for measuring bite force can be made from an elastomer [22], carbon-polymer composite [23], and a bite block [24]. In the past few decades, hydrogels have become more and more prevalent in a wide range of fields, such as drug delivery, tissue engineering, and wound care [25,26]. More precisely, HEC is one of the most widely used commercial soluble cellulose derivatives, with the ability to form gels, as it is highly hydrophilic. Key to the previously mentioned applications is that a three-dimensional polymeric network forms the hydrogels and can absorb large amounts of water, while retaining structural integrity [27]. The edible hydrogels are suitable for mechanical responsive wearable sensors. Using this type of hydrogel, which can fit to the contour of teeth and gums, wearable bite force sensors were developed. These sensors measure and monitor biting forces during eating, speaking, and clenching and provide valuable insights into oral health, especially bruxism (teeth grinding) [28]. An edible hydrogel-based bite force sensor can be integrated into a biofeedback system for dental rehabilitation, providing real-time force feedback to patients with temporomandibular joint disorders [29].
Optical profilometry, a technique employed in a range of disciplines including dentistry, captures three-dimensional information. By means of topographical scans, surface profiles are obtained, allowing examination of alterations in surface morphology [30]. This non-invasive and highly effective method is a valuable tool in acquisition of surface profiles from diverse samples, and can be seamlessly incorporated into various research processes [31].
FTIR spectroscopy plays a crucial role in defining the inherent characteristics and operational features of sensors based on hydrogels. It is widely used for examining alterations in the structure of hydrogels that occur upon dehydration, thereby assessing the extent to which water binding occurs within the hydrogel network [32]. Moreover, it facilitates identification of protein aggregation, allowing detection of protein species of high molecular weight [33]. FTIR spectroscopy is also used in bite force sensors [13].
This study aimed to introduce a hydrogel bite force sensor, based on Hydroxyethyl-cellulose-fructose-water (HEC-F-water), for premolar and molar teeth, and to evaluate it using optical profilometry, infrared spectroscopy (FTIR), and the Instron Tensile testing system.
Material and Methods
ETHICS STATEMENT:
This study was a laboratory-based investigation focused on manufacture and evaluation of an edible hydrogel bite force sensor. No patients were involved, and no patient data were used, rendering the study exempt from the need for ethics approval. This exemption aligns with the guidelines and regulations for research of this type.
FABRICATION AND CHARACTERIZATION OF THE HYDROGEL:
For the capacitor electrodes, an aluminum conductive strip was chosen, cut using a Cutting Plotter device (model CE6000-60 Plus, Tokyo, Japan, Graphtec) to eliminate human influence on the process of making the capacitor plates. Figure 1A shows the Cutting Plotter software pattern, which, after being cut out, is fixed onto an organic dielectric hydrogel, HEC-F-water. The cut capacitor electrodes were sized 0.9 cm by 0.9 cm, a contact strip measuring 0.3 cm in width and 5 cm in length is added to the electrodes for ease of measurement, and HEC-F-water was used for the dielectric material.
The hydrogel is shown in Figure 1B. The elasticity of this material was tested using compression attachments, as well as those with tooth models on them.
We dissolved 42 g of fructose (Aldrich – USA) in 50 g of water, heated the mixture to 90°C, and then added 21 g of HEC (Natrosol 250HHR Aqualon, Ashland Chemicals). After 30 min of agitation, a translucent gel was obtained. The solution was then heated to 98°C to evaporate 40 g of water. After passive cooling to room temperature, a yellow-brown, cohesive, adhesive gel was obtained and used as a dielectric material, without any additional treatment.
The relative permittivity (ɛr) of HEC-F-water was assessed by measuring the capacitance of a copper plate capacitor with a distance of 1 cm between plates before and after addition of the dielectric material. The area of the copper plates was a=4 cm×b=4 cm (clearly indicating a=b >> 1 cm). A value of 67 was obtained at room temperature of 25°C and humidity of approximately 50%.
This value for relative permittivity is in the expected bounds as the hydrogels main property of water retention gives it the value of relative permittivity of below 80 (relative permittivity of water [34[).
After determining the relative permittivity, the density of the material was calculated by preparing samples of the same length and width but with 2 different heights. Specifically, the length and width of the material were 10 mm, while the heights of the material were 1 mm and 5 mm. Five samples were prepared for each height, as shown in Figure 2A and 2B. Figure 2C shows the size confirmation of each sample, whilst Figure 2D represents the setup for mass measurement. The sample with height 5 mm had a mass of 0.64 g, whereas the shorter samples had a mass of 0.24 g.
Optical profilometry of the sample was performed using an Optical Profilometer, model HRM300 (Huvitz). Magnification of 25× was used to capture two-dimensional and three-dimensional photographs of the sample surface, revealing micro-scale surface roughness and potential issues in the contact between the capacitor electrodes and the dielectric material. In addition to use in optical profilometry, FTIR has also been used to analyze the molecular content of the material.
FABRICATION OF THE BITE FORCE TRANSDUCER:
The structuring of the sensing element, the transducer, was done by sticking the aluminum electrodes on both sides of the dielectric material (cut samples of HEC-F-water). The sensing element is shown in Figure 3.
We engage in eco-friendly practices, and we remain resolutely dedicated to minimizing our ecological footprint throughout the entire development process of our devices.
TESTING OF THE SENSOR:
In this subsection, the methods of characterization of the organic transducer are presented, followed by a description of the calibration experiment, determination of the elastic limit of the transducer, and tests of sensitivity, accuracy, reproducibility, and validation are described. Furthermore, the transfer characteristic of the converter, as well as the input and output range of the sensor, have been determined (fitted).
To apply a uniform vertical force for compression, a tensile testing machine (model 34SC-2, Instron) was used (Figure 4A), which is an integral part of all measurements in the study. To simulate the biting process, 3D printed fixtures were added to the tensile testing machine. These fixtures were modeled using AutoCAD Mechanical 2023 software, to simulate the part of the jaw with molar and premolar teeth.
The transducer part of the sensor was tested on the Instron machine for stretching and compression. The process of biting involves a vertical force and a complex torque mechanism. In the measurement process, the biting tests are performed with only vertical force present, due to the restrictions of the equipment used. Several tests were conducted to determine the input force range at which the transducer operates without disturbances, as well as the output capacitance range in relation to the obtained input range. The transfer characteristic of the transducer was then determined by fitting the curve.
The sensitivity of the sensor, defined as the ratio of the input range to the output range, was also calculated. Finally, the accuracy of the entire sensor, including the transducer part and the hardware, was measured to determine the deviation from the real applied force given by the Instron machine, compared to the force displayed on the serial monitor, which was based on the fitted curve. Repeatability was tested by applying force and observing the capacitance over time, repeating this process 3 times.
Figure 4B–4D illustrates the arrangement of 3D-printed attachments on the compression and elongation machine. The attachments are positioned to create a realistic occlusion. These attachments were designed and 3D-printed. Figure 4B–4D depict the occlusion from different sides. The figures depict the main instrument used, while for repeatability, HIOKI impedance analyzer (model IM3590, Japan, Tokyo, manufacturer HIOKI) was used, in the time sweep mode with time step of 6 ms, at a fixed frequency of 100 Hz.
Results
RESULTS OF INFRARED SPECTROSCOPY AND OPTICAL PROFILOMETRY:
The density of the sample was determined and is presented in Figure 5, where 2 different types of samples, with different thickness, were analyzed. One group had a thickness of 5 mm, and the second group had 1 mm thickness. From Figure 5, it can be observed that the density of the hydrogel is not homogeneous, but the average density values of the samples in the form of a quadrilateral prism were approximately equal, with differences of around 0.0005 g/(mm)3. Optical profilometry is shown on Figure 6, where the surface uniformity and surface itself of the hydrogel is shown. Moreover, optical profilometry was done to see if there were substantial irregularities on the surface of the hydrogel, which can lead to unexpected variations in the results. FTIR results are shown in Figure 7.
INITIAL CONDITIONS FOR SENSOR TESTING:
This subsection presents results of experiments conducted to test the converter part of the sensor, as well as the hardware component. For the minimum value, a force of 40 N was chosen due to significant variations in the output variable below that force value. The maximum force value selected was 540 N, as above that force, 100% of the samples were destroyed. It should be noted that 60% of the samples were destroyed – dielectric perforation occurred with a force of 250 N.
All measurements were performed at 100 Hz, as preliminary measurements showed that the highest sensitivity was achieved at that frequency.
INPUT AND OUTPUT RANGE:
A step size of 100 N was chosen, and measurements were conducted in the range of 40 N to 540 N. Measurements were conducted on 3 samples, and the obtained values were averaged at the same compression forces, after which the range was calculated. An input variable range of 500 N was obtained, where the minimum and maximum values were taken from this subsection as the starting and ending force boundaries. The range of the output variable, capacitance, was found to be from Cmin=0.14 nF for Fmin=40 N to Cmax=2.13 nF for Fmax=540 N. A capacitance range of 1.9 nF was obtained, or Cmax/Cmin=15.6 for Fmax/Fmin=13.5. Figure 8 illustrates the relationship between these 2 variables, while Table 1 presents the average values and standard deviations for each measured data point.
In Table 1, more significant variations in capacitance values can be observed at the minimal force of 40 N, where the relative standard deviation is 1.91%. As the applied force increases the relative standard deviation decreases, where at the applied force of 340 N it achieves a minimal value of 0.27%; after that, there is an increase in relative variability. The graph in Figure 8 shows that the characteristic is relatively linear in the range from 140 N to 440 N, but this range is not sufficiently large for a bite force converter.
OBTAINING THE TRANSFER CHARACTERISTIC:
After defining the range of input and output value variations, it is necessary to obtain an appropriate transfer characteristic within the observed range. The third-order polynomial, which was used to fit the measured points and is shown in Table 1, has the lowest mean absolute error of 24.9 pF, over the whole range from 40 N to 540 N. Table 2 shows the value of the mean absolute fitting error with different orders of polynomials. As can be seen in Table 2, with the increase in polynomial order, the error decreases, but this comes at the cost of a higher probability of overfitting. Therefore, a third-order polynomial was chosen. The fitted curve can be seen in Figure 9.
Transfer relation between the input force F and the output capacitance C is shown in (Equation 1).
The inverse equation, which determines the force value based on the measured capacitance, is represented by Equation 2. Specifically, this equation will be implemented in portable readout electronics, based on the Arduino Nano Every (described in the next subsection).
When analyzing the measured points shown in Figure 8, between 140 N and 440 N a seemingly linear characteristic can be noticed. This range was fit with Equation 3, with an R2 of 0.9973. This was tested and displayed in Figure 10.
This characteristic has a mean absolute error of 31.7 pF. This value is higher than the previously mentioned mean absolute error of 24.9 pF obtained from the third-order polynomial. Moreover, the mean absolute value of 31.7 pF is the result of fitting in a narrower range (140 N and 440 N) than that of the third-order polynomial fit. This can be useful for the narrowed range, but for the readout electronics we used the third-order polynomial, as it fully describes the behavior of the transducer in the range of interest.
Since the average bite force is 140–440 N, this fit can be an alternative to the previously shown third-order polynomial explained above. If the linear transfer curve is used in the readout electronics, and the force applied is higher than 440 N or less than 140 N, there will be a significant deviation between the measured and actual force values.
Finally, with the decreased range of the linear fit, shown in Figure 10, the saturation zones below 140 N and above 440 N are not encompassed with the fit, which gives a greater error and lower reliability of accurate measurements in those regions. The sensor’s transfer characteristic was validated through the calculation and comparison of the mean absolute error.
The saturation zone below 100 N can be tied to the roughness and imperfections shown from optical profilometry (Figure 6B). The force below 100 N is not high enough to create a significant difference in the overall capacitance of the transducer, as the contact points are defined from the occlusion points shown in Figure 4B–4D [33]. On the other hand, the saturation zone above 450 N is the direct consequence of the destruction of the transducer.
In conclusion, the third-order polynomial was chosen as the better fit due to its ability to describe the saturation zones, covering the whole range of the manufactured bite force transducer. The obtained sensitivity was 3.98 pF/N, which represents the ratio between the output and input range of the sensor.
READOUT ELECTRONICS:
With the goal of having an easy-to-use, cost-effective, and portable way to read the applied bite force, as well as to pave the way for such a gadget in medical application, an electrical circuit with readout electronics was developed (Figure 11).
The readout electronics consists of an Arduino Nano Every, onto which a voltage divider has been added, where one of the capacitors is the bite force transducer, and the other one is the internal capacitance of the pin, according to the manufacturer’s datasheet, which equals approximately 25 pF.
The Arduino Nano Every was programmed to convert the measured capacitance into force, using a lookup table made from equation (2).
To test the accuracy of the transducer and the portable readout part, the whole system was hooked up to the Instron tensile testing system. The applied forces were between 40 N and 540 N, with a step of 100 N, and after each step the value on the serial monitor of the readout electronics was read. Finally, the equivalent error was calculated as the absolute value of the subtraction of the administered force from the Instron tensile testing system and the estimated force shown on the serial monitor. This error encompasses the variability of the transducer, the error of fitting, and the conversion error (Table 3).
The results were validated by comparing the administered force and the force measured by the readout electronics. The average absolute measurement error was 10.78 N, while the deviation expressed in percentage was 4.1%. This value is relatively low, although there was a larger deviation compared to the fitting of the measured capacitance dependence on the specified force (Table 2). When analyzing only the approximated linear range between 140 N and 440 N, the error was 4.3%. The sensor’s functionality was validated via the previously described deviation percentage.
REPETITION TESTING:
After defining and fully characterizing the bite force transducer and its readout electronics, it is necessary to determine if there is a need to change the transducer after every attempt of measurement or if there is an acceptable number of fails during bite force measurement. Repeatability was observed through two experiments. The first experiment involved applying and holding a constant force for 2 min, followed by step-wise increases. The results of this experiment are shown in Figure 12A. The results of the second experiment, which simulated chewing by rapidly changing the force from 200 N to approximately 0 N, are displayed in Figure 12B. We used a HIOKI impedance analyzer (model IM3590, Japan, Tokyo, manufacturer HIOKI) to perform these tests.
In Figure 12A, the repeatability test is shown for 3 averaged samples. There is a certain presence of noise at constant force values, which could be due to vibrations and slight variations in the action of the force-applying device. However, the mean values of each cycle at constant force do not deviate significantly (around 40 pF), and this is within the capacitance margin of error obtained from the previously determined transfer curve. Gradually increasing the force and longer durations of holding a specific force value reduces the transient period to reach a relatively constant capacitance value, which was not the case in Figure 12B. It is important to note that in the third cycle of repetition, larger changes in capacitance occurred compared to the previous 2 cycles, where the capacitance value decreased at 140 N. The relaxation time of the sample was not measured, and data collection began only after reaching the specified force level.
In the stress simulation this was not the case, and measurements were taken immediately after the device was activated. The reason for this was to observe the settling time, which is the time it takes to reach a 90% value in the steady state. On average, this settling time was 4.8 s. The settling time increased after each force action, and significant variations in capacitance were observed after 3 cycles. In the third cycle there was a high error in comparison to the value in the transfer curve; this could be associated with the pre-destruction of the material, as well as the previously shown inhomogeneity in Figure 5. In the fourth cycle, sample rupture occurred.
Discussion
This study focused on the development and characterization of an innovative transducer for measuring bite force. This transducer utilizes a capacitive sensing mechanism. To obtain a functional transducer based on a capacitor, it is necessary to select a dominantly elastic dielectric material that will be placed between the capacitor electrodes, as well as sufficiently thin capacitor electrodes that will not offer significant resistance to deformation or strain. In addition to the aforementioned requirements, it is necessary for the materials to be edible or non-harmful to the human body. The design incorporates a unique combination of materials, including an organic dielectric material known as HEC-F-water hydrogel, which is placed between thin aluminum capacitor electrodes. The selection of these materials is motivated by the desire for elasticity, biocompatibility, and the ability to conform to non-uniform surfaces. High water retention and elasticity are key attributes of HEC hydrogels. Moreover, aluminum electrodes exhibit high temperature stability as well as bendability, which is favorable during biting. Contrary to the apprehension regarding the susceptibility of aluminum to damage, it is widely recognized for its remarkable corrosion resistance properties. Therefore, the main risk involves the hydroxyethyl-cellulose-fructose-water (HECWH) material, which can undergo deterioration under the applied forces. By emphasizing that the aluminum component is not subject to the destructive forces, this effectively alleviates any potential worries or concerns that may arise. Aluminum is commonly used in dentistry [35]. The fabrication of the transducer involved precisely cutting materials using a device called a Cutting Plotter, ensuring that the process could be reproduced accurately. The dielectric material was subjected to various techniques to determine its relative permittivity, density, and surface roughness. These techniques included optical profilometry and FTIR. The present study showed the relationship between the force applied to the transducer and the resulting change in capacitance, as well as the calibration and characterization of the chosen materials, which establish the foundation for understanding the potential applications of the device, its limitations, and opportunities for future enhancements.
In the literature, the new bite force measuring device has been validated and found to have high accuracy and reproducibility, making it suitable for patients undergoing mandibular reconstruction. Moreover, a self-powered bite force sensor has been proposed for wearable bite force measurement systems, offering the potential for a mouthguard-type monitoring system. Intraoral sensors have been tested in dentistry, neurology, physical medicine, and rehabilitation, showing potential for applications in healthcare and wellness [6]. A recently developed bite force sensor has demonstrated inter- and intra-examiner reliability, making it a reliable device for measuring bite force. Furthermore, force sensors based on the strain gauge effect consist of a flexible pressure-sensitive element and a strain gauge. When pressure or strain changes, it leads to a variation in the electrical resistance of the material (element), enabling the coupling of these 2 quantities. These sensors have high sensitivity and precision and a wide measurement range. They are compact and lightweight, allowing for use in the oral cavity. An example of a force sensor based on this principle is the Dentoforce 2 converter. Although these sensors convert force values quite accurately, the rigid surface of the converter prevents the sensing element from fully conforming to the tooth surface [13]. Force sensors based on the piezoresistive effect are also used. The piezoresistive converter is composed of a silicon monocrystal material and an integrated circuit. When a silicon monocrystal detects force, it undergoes a change in resistance, thereby altering the output signal. These sensors have fast dynamic response and good stability, precision, and sensitivity [13]. In addition to the aforementioned transducers, a force-sensitive resistor (FSR) can also be used [14].
Combined use of these converters has certain advantages [13]. Also, the so-called IDDK (force transducer with a load fork) has found wide application. It was successfully used in many studies to analyze bite force, and can measure forces up to 1 kN [13,20]. These state-of-the-art bite force sensors use a range of techniques and designs. Some sensors utilize strain gauges or load cells integrated into dental prostheses, allowing direct measurement of the force exerted on the dentition.
Differences in density or heterogeneity of the medium can affect the repeatability of measurement; for example, an increase in the water content in the dielectric material alters its properties and vice versa. We used a thickness of 5 mm for the dielectric material, as the 1-mm thickness group had a higher standard deviation than 5-mm ones.
The absorbance had a relatively narrow peak in the functional group region between 3500 cm−1 and 3300 cm−1, indicating the presence of an OH group in the tested sample. This functional group region coincides with HEC hydrogel FTIR [36]. In contrast to the known functional group region, the fingerprint region shows the individual characteristics of the hydrogel. Quantification of sensor properties was performed to gain a clearer understanding of the sensor’s behavior in a real environment. This result highlights a limitation of the material, and it should be modified to be used as a force conversion element in the sensor. However, the maximum bite force recorded is around 570 N, while the average bite force is approximately 200 N [37–39].
Table 4 shows the comparison between 3 different capacitive bite force sensors, including the one presented in this paper. In comparison to the capacitive bite force sensor reported by Cheng et al. [18], the developed bite force sensor was tested on premolars and molars, with high sensitivity and accuracy. Although the range of change at the output is the same (500 N), the linear range of the transfer curve is lower than that of the bite force sensor reported by Cheng et al. Additionally, the bite force sensor presented in this paper is biodegradable and biocompatible, unlike the flexible MLCC (multilayer ceramic capacitor) type bite force sensor reported by Lin et al. [19].
Table 5 provides an overview of the characteristics observed in the proposed bite force sensor. The converter has adequate input and output range, sensitivity, accuracy and repeatability. Its reproducibility has room for improvement, considering the necessity of carefully selecting the sampling location of the hydrogel for obtaining the transducer material. Furthermore, the third-order transfer characteristic is not an optimal solution in terms of stability, but it was chosen as a compromise to reduce measurement errors. If the operating range of the converter is reduced to the interval of 140 N to 440 N, a linear characteristic can be achieved by fitting a first-order polynomial. However, this range should be expanded for stress force measurements.
The presented characteristics of a capacitive bite force transducer show promising results, and can be compared to sensors and transducers based on other physical laws. Other sensors employ piezoresistive, piezoelectric, or optical principles to convert mechanical force into electrical signals, enabling non-invasive measurements.
Advances in wireless and miniaturization technologies have facilitated the integration of bite force sensors into wearable devices, providing real-time monitoring and long-term data collection. These innovative bite force sensors have already demonstrated potential in several biomedical applications. For instance, in prosthodontics, bite force sensors have been used to optimize the design and fitting of dentures, ensuring proper occlusion and preventing discomfort or damage to oral tissues. In orthodontics, these sensors enable orthodontists to monitor the effects of orthodontic appliances on bite force distribution, aiding in treatment planning and evaluation.
Additionally, in rehabilitation medicine, bite force sensors contribute to the assessment and therapy of temporomandibular joint disorders and orofacial pain conditions. The state-of-the-art sensors have shown good potential in prosthodontics, orthodontics, and rehabilitation medicine. With continued advances in sensor technology and data analysis techniques, the future of bite force sensors in biomedical engineering appears promising, offering opportunities for personalized diagnostics, remote monitoring, and enhanced treatment outcomes.
The importance of environmentally responsible, edible electronics in the design of bite force sensors lies in their potential to address concerns related to environmental sustainability, biocompatibility, and consumer safety. By utilizing renewable, edible materials, such as biodegradable polymers or natural extracts, in the fabrication of these sensors, we can minimize the ecological footprint associated with their production, use, and disposal. Moreover, incorporating edible components in bite force sensors ensures their compatibility with the human body, reducing the risk of adverse reactions or complications. This makes them particularly suitable for applications in dentistry and oral healthcare, where direct contact with oral tissues is necessary. Furthermore, the use of edible electronics opens up possibilities for innovative applications, such as disposable or ingestible sensors, which can be easily digested or eliminated after use. By embracing green, edible electronics in bite force sensor design, we not only address the pressing need for sustainable and biocompatible technologies but also unlock novel opportunities for personalized diagnostics, remote monitoring, and non-invasive healthcare interventions. Edible materials have been the studied by many research groups, and have become an obvious target for incorporation in bite force sensors. With their high elasticity and durability, hydrogels, if made edible, present a relatively fruitful avenue for exploration.
Some of the strengths of the study are noteworthy. The study introduces an innovative approach to bite force sensing through the utilization of a capacitive transducer with an organic dielectric material. This unique design has the potential to address the challenges posed by traditional force sensors and opens up new possibilities in this field. The detailed characterization of the hydrogel, encompassing parameters such as relative permittivity, density, and surface roughness, provides a comprehensive understanding of the chosen dielectric material. This knowledge is crucial in optimizing the performance of the sensor and ensuring its efficacy. The use of a Cutting Plotter device for precise cutting of aluminum capacitor electrodes ensures reproducibility and eliminates any potential human influence. This precision in fabrication techniques contributes to the reliability of the study’s findings and enhances the overall credibility of the research. The present study used a meticulous approach to ensuring accurate force measurements through a thorough calibration process. The determination of the transfer characteristic using a third-order polynomial adds transparency to the methodology and strengthens the reliability of the results. The development of a portable and cost-effective readout system using an Arduino Nano Every offers practicality for potential applications in medical contexts. The integration of an easy-to-use electronic circuit enhances the study’s applicability and widens its potential use in various settings. The study provides a detailed analysis of measurement errors, including the variability of the transducer, fitting errors, and conversion errors. This transparency in error analysis strengthens the reliability of the study, and the reported low average absolute measurement error underscores the accuracy of the proposed system.
The present investigation had some limitations and there are areas for improvement. We acknowledge the restriction of only applying vertical force during testing, thereby neglecting the complexities associated with actual biting mechanics, such as torque. Future studies could explore alternative methods to simulate force applications that are more representative of real-world scenarios. With regards to testing, the study conducted measurements at a frequency of 100 Hz based on preliminary findings. However, the impact of varying frequencies on the performance of the sensor remains unexplored. Investigating the behavior of the sensor across a broader frequency range could yield valuable insights and enhance our understanding of its capabilities. The observed non-homogeneous density in the hydrogel, as depicted in Figure 5, may have implications for the accuracy of the sensor. To address this issue, it would be beneficial to improve manufacturing processes or consider alternative materials that can mitigate the variability and enhance the reliability of the transducer. The study highlights a force threshold beyond which 100% of the samples were destroyed. To extend the lifespan and broaden the range of applications for the device, it is important to understand the factors contributing to its destruction and explore potential strategies to increase its robustness. The linear characteristic of the force-to-capacitance relationship is limited to a specific force range of 140 N to 440 N. Expanding this linear range or developing a more adaptive transfer characteristic could greatly enhance the accuracy of the sensor across a wider range of forces. The study focused on fabrication and testing under varying compressive forces to advance medical applications in oral rehabilitation, gnathology, prosthodontics, and bioengineering.
Conclusions
We introduced and assessed a novel bite force sensing element based on a change in capacitance. The sensor has been fully characterized, and its main functional characteristics have been defined. The use of HEC-F-water as a dielectric is a pioneering approach towards creating fully edible sensors for evaluating masticatory function. The presented comprehensive characterization through optical profilometry and FTIR and Instron tensile testing system highlights the sensor’s robustness and reliability. Future prospects of bite force sensors in biomedical engineering are promising. With ongoing advances in sensor technology, there is potential for further miniaturization, increased sensitivity, and improved durability of these sensors. Additionally, the integration of bite force sensors with advanced data processing algorithms and machine learning techniques may provide valuable insights, leading to personalized diagnostics and treatment approaches. Moreover, the integration of bite force sensors into Internet of Things (IoT) platforms may enable remote monitoring and telehealth applications, facilitating long-term studies and expanding access to bite force assessment. In conclusion, the development of bite force sensors has opened up new possibilities for precise and objective evaluation of occlusal forces in various biomedical applications.
Figures
 Figure 1. Fabrication of the transducer: (A) Pattern for the electrodes designed in the Cutting Plotter software; (B) Sample of Hydroxyethyl-cellulose-fructose-water, from which all transducers were made. Software used: Auto CAD mechanical, Microsoft Power Point & Author photograph.
Figure 1. Fabrication of the transducer: (A) Pattern for the electrodes designed in the Cutting Plotter software; (B) Sample of Hydroxyethyl-cellulose-fructose-water, from which all transducers were made. Software used: Auto CAD mechanical, Microsoft Power Point & Author photograph. 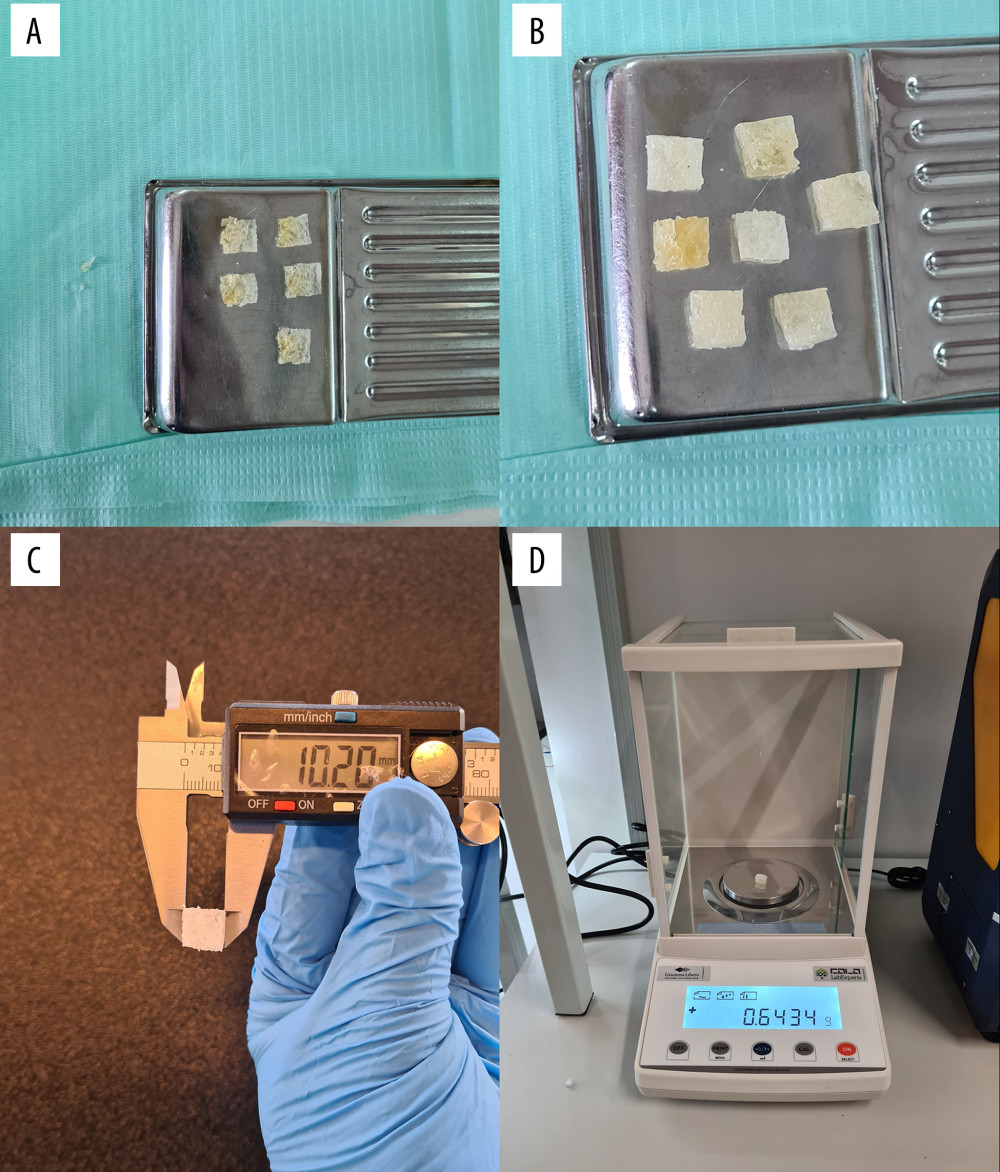 Figure 2. Samples for optical profilometry, FTIR and tensile tests: (A) Prepared samples with thickness of 5 mm; (B) Prepared samples with thickness of 1 mm; (C) Width of the cut materials; (D) Setup for mass measurements. Software used: Panasis, Microsoft Power Point & Author photographs.
Figure 2. Samples for optical profilometry, FTIR and tensile tests: (A) Prepared samples with thickness of 5 mm; (B) Prepared samples with thickness of 1 mm; (C) Width of the cut materials; (D) Setup for mass measurements. Software used: Panasis, Microsoft Power Point & Author photographs.  Figure 3. Sample of the fabricated sensing element with terminals. Author photograph
Figure 3. Sample of the fabricated sensing element with terminals. Author photograph  Figure 4. Compression test setup (A) Instron machine; (B–D) View of the 3D printed jaw fixture added onto the Instron machine. Author photographs.
Figure 4. Compression test setup (A) Instron machine; (B–D) View of the 3D printed jaw fixture added onto the Instron machine. Author photographs.  Figure 5. Measurement of the density of the hydrogel. Software used: Graph Pad Prism.
Figure 5. Measurement of the density of the hydrogel. Software used: Graph Pad Prism.  Figure 6. Optical profilometry results: (A) Two-dimensional profilometry image of the dielectric hydrogel; (B) Three-dimensional surface approximation of the dielectric hydrogel. Software used: Panasis, Microsoft Power Point.
Figure 6. Optical profilometry results: (A) Two-dimensional profilometry image of the dielectric hydrogel; (B) Three-dimensional surface approximation of the dielectric hydrogel. Software used: Panasis, Microsoft Power Point.  Figure 7. FTIR spectroscopy results. Software used: FTIR fabricated software.
Figure 7. FTIR spectroscopy results. Software used: FTIR fabricated software.  Figure 8. Capacitance of the sensing element as a function of applied force. Software used: Graph Pad Prism.
Figure 8. Capacitance of the sensing element as a function of applied force. Software used: Graph Pad Prism.  Figure 9. Third-order polynomial fit. Software used: Graph Pad Prism.
Figure 9. Third-order polynomial fit. Software used: Graph Pad Prism.  Figure 10. Linear fit in the range between 140 N and 440 N. Software used: Graph Pad Prism.
Figure 10. Linear fit in the range between 140 N and 440 N. Software used: Graph Pad Prism.  Figure 11. Schematic diagram of readout electronics. Software used: Microsoft Power Point.
Figure 11. Schematic diagram of readout electronics. Software used: Microsoft Power Point.  Figure 12. Simulation of real-life applications: (A) Repeatability test; (B) Chewing simulation test. Software used: Graph Pad Prism, Microsoft Power Point.
Figure 12. Simulation of real-life applications: (A) Repeatability test; (B) Chewing simulation test. Software used: Graph Pad Prism, Microsoft Power Point. Tables
Table 1. Representation of mean values and standard deviations for measurement points. Table 2. Mean absolute error of fitting in relation to the polynomial order.
Table 2. Mean absolute error of fitting in relation to the polynomial order. Table 3. Deviation of measured force from the specified value and display of measurement error.
Table 3. Deviation of measured force from the specified value and display of measurement error. Table 4. Comparison of different realizations of capacitive bite force sensors.
Table 4. Comparison of different realizations of capacitive bite force sensors. Table 5. Table of measured characteristics of the proposed bite force sensor.
Table 5. Table of measured characteristics of the proposed bite force sensor.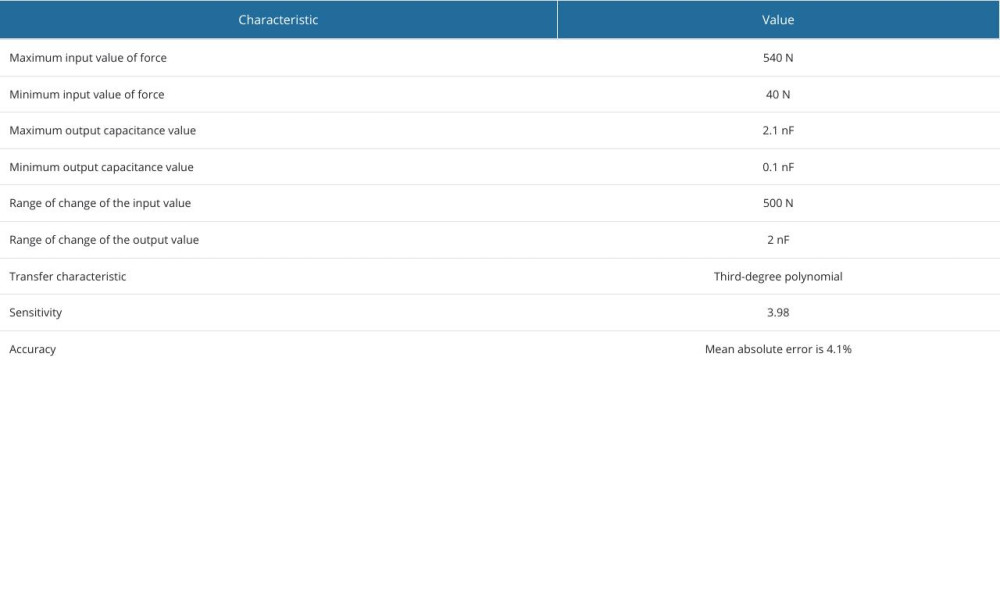
References
1. Levartovsky S, Peleg G, Matalon S, Maximal bite force measured via digital bite force transducer in subjects with or without dental implants – a pilot study: Applied Sciences, 2022; 12(3); 1544
2. Patil SR, Maragathavalli G, Ramesh D, Bite force: A contemporary narrative review: Int J Health Sci Res, 2022; 12(5); 108-16
3. Al-Gunaid T, Bite force – what we should know: A literature review: Int J Orthod Rehabil, 2019; 10(4); 168
4. Abe I, Milczewski MS, Souza MA, The force magnitude of a human bite measured at the molar intercuspidation using fiber Bragg gratings: J Microw Optoelectron Electromagn Appl, 2017; 16(2); 434-44
5. Szymańska J, Sidorowicz Ł, Bite force and its correlation with long face in children and youth: Folia Morphol, 2015; 74(4); 513-17
6. Gao J, Su Z, Liu L, Design and implement strategy of wireless bite force device: Bioengineering, 2023; 10(5); 507
7. Ichikawa K, Hijikata W, Novel self-powered flexible thin bite force sensor with electret and dielectric elastomer: Sensors and Materials, 2022; 34(11); 4237
8. Liu C, Guan C, Li Y, Advances in electrochemical biosensors for the detection of common oral diseases: Crit Rev Anal Chem, 2024 [Online ahead of print]
9. Lee DY, Hu Z, Do Q, Demo abstract: Real-time teeth functional occlusion monitoring via in-mouth vibration sensing; 505-6, IEEE
10. Seema PD, Suchitra V, Hooli SS, Design and development of a bite force measuring device: Emerging Trends in Photonics, Signal Processing and Communication Engineering. Vol 649. Lecture Notes in Electrical Engineering, 2020; 1-7, Singapore, Springer
11. Verma TP, Kumathalli KI, Jain V, Kumar R, Bite force recording devices – a review: J Clin Diagn Res, 2017; 11(9); ZE01–5
12. Ortuğ G, A new device for measuring mastication force (Gnathodynamometer): Ann Anat, 2002; 184(4); 393-96
13. Gu Y, Bai Y, Xie X, Bite force transducers and measurement devices: Front Bioeng Biotechnol, 2021; 9; 665081
14. Fernandes CP, Glantz POJ, Svensson SA, Bergmark A, A novel sensor for bite force determinations: Dent Mater, 2003; 19(2); 118-26
15. Steffen C, Duda K, Wulsten D, Clinical and technical validation of novel bite force measuring device for functional analysis after mandibular reconstruction: Diagnostics, 2023; 13(4); 586
16. De Almeida E, Bueno L, Kwong MT, Bergmann JHM, Performance of oral cavity sensors: A systematic review: Sensors, 2023; 23(2); 588
17. Patil SR, Maragathavalli G, Ramesh DNSV, The reliability of a new device for measuring the maximum bite force: BioMed Research International, 2022; 2022; 1-6
18. Cheng S, Chen B, Zhou Y, Soft sensor for full dentition dynamic bite force: Extreme Mechanics Letters, 2020; 34; 100592
19. Lin KR, Chang CH, Liu TH, Experimental and numerical estimations into the force distribution on an occlusal surface utilizing a flexible force sensor array: J Biomech, 2011; 44(10); 1879-84
20. Bueno PM, Kiemle Trindade PA, Medeiros LH, Bite force assessment before and after orthognathic surgery in individuals with repaired cleft lip and palate: J Oral Biol Craniofac Res, 2021; 11(2); 138-42
21. Panda S, Hajra S, Kim HG, Sustainable solutions for oral health monitoring: Biowaste-derived triboelectric nanogenerator: ACS Appl Mater Interfaces, 2023; 15(30); 36096-106
22. Koc D, Dogan A, Bek B, Bite force and influential factors on bite force measurements: A literature review: Eur J Dent, 2010; 4(2); 223-32
23. Kim JH, McAuliffe P, O’Connell B, Development of a wireless autonomous bruxism monitoring device, 2010 http://www.biosignal.cz/bs2010/papers/1022.pdf
24. Rokade H, Joshi V, Katkar S, Dental force measurement using peizoelectric sensors: IJRASET, 2022; 10(11); 1543-46
25. Caló E, Khutoryanskiy VV, Biomedical applications of hydrogels: A review of patents and commercial products: European Polymer Journal, 2015; 65; 252-67
26. Mattam L, Bijoy A, Abraham D, Conducting polymers: A versatile material for biomedical applications: ChemistrySelect, 2022; 7
27. Batista RA, Espitia PJP, de Quintans JSS, Hydrogel as an alternative structure for food packaging systems: Carbohydr Polym, 2019; 205; 106-16
28. Huang X, Liu Y, Cheng H, Materials and designs for wireless epidermal sensors of hydration and strain: advanced functional materials, 2014; 24; 201303886
29. Florjański W, Małysa A, Orzeszek O, Evaluation of biofeedback usefulness in masticatory muscle activity management – a systematic review: J Clin Med, 2019; 8(6); 766
30. Hartkamp O, Peters F, Bothung H, Optical profilometry versus intraoral (handheld) scanning: Int J Comput Dent, 2017; 20(2); 165-76
31. Vale B, Orr A, Elliott C, Stotesbury T, Optical profilometry for forensic bloodstain imaging: Microsc Res Techn, 2023; 86(10); 1401-8
32. Enev V, Sedláček P, Řihák M, IR-supported thermogravimetric analysis of water in hydrogels: Front Mater, 2022; 9; 931303
33. Salem DP, Gong X, Lee H, Characterization of protein aggregation using hydrogel-encapsulated nIR fluorescent nanoparticle sensors: ACS Sens, 2020; 5(2); 327-37
34. Smirnov I, The effect of MRET polymer compound on SAR values of RF phones: J Microw Power Electromagn Energy, 2008; 42; 42-54
35. Su FY, Segal A, Use of aluminum foil to facilitate open-tray implant impressions: J Prosthet Dent, 2023; 129(1); 239-40
36. El Fawal GF, Abu-Serie MM, Hassan MA, Elnouby MS, Hydroxyethyl cellulose hydrogel for wound dressing: Fabrication, characterization and in vitro evaluation: Int J Biol Macromol, 2018; 111; 649-59
37. Altaf D, Nawaz M, Hassan M, Association of handedness and maximum voluntary bite force on respective side of oral cavity: International Journal of Dentistry and Oral Science, 2020; 872-75
38. Edmonds HM, Glowacka H, The ontogeny of maximum bite force in humans: J Anat, 2020; 237(3); 529-42
39. : The Fundamentals of Occlusion and Jaw Function | Inside Dental Technology https://cdeworld.com/courses/5128-the-fundamentals-of-occlusion-and-jaw-function
Figures
Figure 1. Fabrication of the transducer: (A) Pattern for the electrodes designed in the Cutting Plotter software; (B) Sample of Hydroxyethyl-cellulose-fructose-water, from which all transducers were made. Software used: Auto CAD mechanical, Microsoft Power Point & Author photograph.Figure 2. Samples for optical profilometry, FTIR and tensile tests: (A) Prepared samples with thickness of 5 mm; (B) Prepared samples with thickness of 1 mm; (C) Width of the cut materials; (D) Setup for mass measurements. Software used: Panasis, Microsoft Power Point & Author photographs.Figure 3. Sample of the fabricated sensing element with terminals. Author photographFigure 4. Compression test setup (A) Instron machine; (B–D) View of the 3D printed jaw fixture added onto the Instron machine. Author photographs.Figure 5. Measurement of the density of the hydrogel. Software used: Graph Pad Prism.Figure 6. Optical profilometry results: (A) Two-dimensional profilometry image of the dielectric hydrogel; (B) Three-dimensional surface approximation of the dielectric hydrogel. Software used: Panasis, Microsoft Power Point.Figure 7. FTIR spectroscopy results. Software used: FTIR fabricated software.Figure 8. Capacitance of the sensing element as a function of applied force. Software used: Graph Pad Prism.Figure 9. Third-order polynomial fit. Software used: Graph Pad Prism.Figure 10. Linear fit in the range between 140 N and 440 N. Software used: Graph Pad Prism.Figure 11. Schematic diagram of readout electronics. Software used: Microsoft Power Point.Figure 12. Simulation of real-life applications: (A) Repeatability test; (B) Chewing simulation test. Software used: Graph Pad Prism, Microsoft Power Point. Tables
Table 1. Representation of mean values and standard deviations for measurement points.Table 2. Mean absolute error of fitting in relation to the polynomial order.Table 3. Deviation of measured force from the specified value and display of measurement error.Table 4. Comparison of different realizations of capacitive bite force sensors.Table 5. Table of measured characteristics of the proposed bite force sensor.Table 1. Representation of mean values and standard deviations for measurement points.Table 2. Mean absolute error of fitting in relation to the polynomial order.Table 3. Deviation of measured force from the specified value and display of measurement error.Table 4. Comparison of different realizations of capacitive bite force sensors.Table 5. Table of measured characteristics of the proposed bite force sensor. In Press
Clinical Research
Effects of Single-Bout Endurance Exercise Intensity on Peripheral Neurotrophic Factors in Patients With Isc...Med Sci Monit In Press; DOI: 10.12659/MSM.952089
Review article
Anisodus tanguticus in Cancer Research: A Review of Traditional Use, Phytochemistry, Extraction Methods, an...Med Sci Monit In Press; DOI: 10.12659/MSM.952999
Clinical Research
Nasal Mucociliary Clearance and Its Relationship With Disease Severity in Patients With Multiple SclerosisMed Sci Monit In Press; DOI: 10.12659/MSM.952850
Clinical Research
Modified Thoracoabdominal Nerves Block Through the Perichondrial Approach vs Subcostal Transversus Abdomini...Med Sci Monit In Press; DOI: 10.12659/MSM.953976
Most Viewed Current Articles
17 Jan 2024 : Review article 14,176,570
Vaccination Guidelines for Pregnant Women: Addressing COVID-19 and the Omicron VariantDOI :10.12659/MSM.942799
Med Sci Monit 2024; 30:e942799
13 Nov 2021 : Clinical Research 3,762,188
Acceptance of COVID-19 Vaccination and Its Associated Factors Among Cancer Patients Attending the Oncology ...DOI :10.12659/MSM.932788
Med Sci Monit 2021; 27:e932788
14 Dec 2022 : Clinical Research 2,466,310
Prevalence and Variability of Allergen-Specific Immunoglobulin E in Patients with Elevated Tryptase LevelsDOI :10.12659/MSM.937990
Med Sci Monit 2022; 28:e937990
16 May 2023 : Clinical Research 708,927
Electrophysiological Testing for an Auditory Processing Disorder and Reading Performance in 54 School Stude...DOI :10.12659/MSM.940387
Med Sci Monit 2023; 29:e940387