04 September 2020: Animal Study
Individualized Running Wheel System with a Dynamically Adjustable Exercise Area and Speed for Rats Following Ischemic Stroke
Yu-Lin Wang123ABC, Jui-Chi Cheng4AB, Ching-Ping Chang5BCDE, Fong-Chin Su1EF*, Chi-Chun Chen4ABDEFGDOI: 10.12659/MSM.924411
Med Sci Monit 2020; 26:e924411






Abstract
BACKGROUND: An innovative animal running wheel with an individualized design was implemented for the rehabilitation of rats following ischemic stroke.
MATERIAL AND METHODS: The design of the running wheel platform included the running wheel and a side plate for exercise area adjustments. A U-curve with a width of 2 cm was drawn on the lower half of the side plate for the dynamic adjustments of five infrared (IR) sensors based on the physical fitness of the rats. The individualized training process for this running wheel consisted of 2 days of free training to record their average and maximum speeds, 3 days of progressive training to determine their exercise areas, and 2 weeks of normal training based on their average speeds, maximum speeds, and exercise areas. Blood samples were obtained from the tail veins of all rats before the operations and on Days 14, 21, and 28 postsurgery to measure cortisol levels. The motor function tests were performed on Days 7 and 28 postsurgery. On Day 28 postsurgery, the rats were sacrificed under anesthesia, and their brains were removed for Nissl and H&E staining.
RESULTS: On Day 28 after surgery, the motor function, lesion volume, and cell damage of the DEARW and control groups differed significantly, indicating that this device is effective for stroke rehabilitation.
CONCLUSIONS: The outcomes of the rats that were rehabilitated using the newly designed training system were better than those of their control-group counterparts, indicating the advantages of this designed system.
Keywords: Exercise, Individualized Medicine, Rehabilitation, Stroke, ischemic stroke, Physical Conditioning, Animal, stroke rehabilitation
Background
Ischemic stroke has been of concern to the public for many years, and its related physical and mental impairments deteriorate patients’ quality of life [1,2]. Hence, exercise rehabilitation mechanisms are required for patients who have experienced stroke to recover their motor functions. The effectiveness of exercise rehabilitation for the treatment of ischemic stroke has been validated [3–5] and has been confirmed using an animal stroke model, which is a prerequisite for human use [5–7]. However, well-designed exercise rehabilitation mechanisms remain unavailable for basic and clinical research, because the training strength cannot be individualized for a given subject when using commercial animal-training platforms. Accordingly, the common problems of undertraining and overtraining cannot be resolved together [8].
Running wheels and treadmills comprise the majority of currently available animal-training platforms, and all have inherent disadvantages. Running wheels can be categorized into voluntary and motorized types. In voluntary running wheels, experimental results are susceptible to the high intersubject variability among rats, meaning that subjects must be screened in advance [9,10]. In motorized running wheels (MRWs), rats are forced to run. As reported in a previous study [11], rats can be reluctant to exercise, and thus hold on to the rail of a commercial MRW. When using treadmills, rats are electrically stimulated at the end [12], resulting in considerable stress and reducing the value of experimental results. Some studies have shown that a treadmill and a forced running wheel promoted recovery from stroke at low [13,14] and moderate [15] training strength, respectively. However, a treadmill inevitably imposes a high stress level on rats due to the electrical stimulus. Therefore, an individualized training platform should be designed, where rats can be trained with low mental stress for experiments in physiology and related fields.
An innovative running-wheel-based training mechanism was previously developed by our team [16,17]. Four infrared (IR) transmitter-receiver pairs were employed to monitor the position of a rat and thus quantify the effective training level. Crucially, this platform was experimentally validated to outperform its commercial counterparts with respect to stroke prevention. It was equipped with an acceleration and deceleration mechanism to improve the rehabilitation of rats who have had a stroke [18]. However, the sensors on this platform were stationary. Rats with poor physical fitness were observed to be afraid to run in a 45° position [18]. Therefore, the amount of exercise they received during training was reduced [18]. Hence, by establishing individualized exercise areas for each rat, specifically the area in which the rat is in constant exercise, their exercise performance can be improved.
The establishment of individualized exercise areas is critical to the efficient operation of the running wheel. In the present study, an innovative running-wheel platform named the dynamic exercise areas running wheel (DEARW) was designed with dynamically adjustable exercise areas for rats with different levels of physical fitness. Using such a platform, rats with strokes can receive frequent rehabilitation sessions at full capacity and remain injury-free while using the well-developed individualized exercise areas. On the basis of this feature, the proposed wheel-based rehabilitation mechanism has clear advantages over its commercial alternatives. The aim of this study was to assess the value of the system for clinical practice by evaluating the changes in neurological severity scores, sensory motor tests, and brain neuron pathological findings in rats with ischemic stroke by using the various training platforms over scheduled 3-week programs.
Material and Methods
MECHANISM DESIGN OF THE RUNNING-WHEEL PLATFORM:
The running-wheel platform comprised two parts, namely the main body (Figure 2A) and the bracing frame of the side plate for exercise area adjustments (Figure 2B). The main body of the running wheel consisted of two pieces of transparent, circular acrylic (diameter=50 cm). For each acrylic piece, four quarter sectors were removed to form frames for the training wheel. These two pieces were connected by iron rods with an interval of 2 cm. Additionally, the centers of the two pieces were also connected using an iron rod with a 1.5 cm diameter, which could be passed through the running wheel from the side of the bracing frame to form a pluggable design (Figure 2C). The bracing frame comprised two iron plates, the lower halves of which were designed in accordance with the acrylic main body. A U-curve was drawn on the bracing frame for the deployment and adjustment of the sensors. The U-curves on the two iron plates were matched, with IR transmitters and receivers placed opposite to each other. The complete running wheel mechanism is depicted in Figure 2D.
HARDWARE CIRCUIT:
As shown in Figure 3, the hardware circuit controlled the exercise area and speed by using the MCU, motor, and five IR sensors. An EFM8LB1 (Silicon Labs) was the main control processor. In it, the embedded digital-to-analog converter (DAC) was used to generate analog voltage signals to control the motor speed. A CDBLS-4250-24V brushless direct current motor and a CDXBL-32-24 motor driver (Chyen Den Enterprise CO., LTD) were used to drive the running-wheel platform. The motor driver was set to run in a counterclockwise direction so that the running wheel would spin clockwise. Five IR sensors were installed on the side of the running wheel to sense the rat’s position, and the sensing signals were passed to the general-purpose input/output (IO) pin of the MCU to provide it with the rat’s actual position.
CONTROL SOFTWARE:
The control-flow diagram for the main program of the running wheel rehabilitation system is displayed in Figure 4. First, the IO port register was initialized to receive IR sensor data. Subsequently, the universal asynchronous receiver/transmitter (UART) established a connection to the computer. Finally, a timer and a DAC performed fixed-time tasks and generated the motor control signals. This program was used on a personal computer. After securing a connection, the system waited for the user to select a training mode (i.e., free, progressive, or normal training) on the computer.
The operation procedure for the free training mode is illustrated in Figure 5A. First, Timer 0 was activated to record the training time, and “mark signals” were detected from the side of the running wheel. Black, opaque marks were attached to the side of the running wheel at intervals of 90°, and the signals were only read in these positions. Therefore, a rat had run one quarter of the wheel circumference every time a mark signal was detected. The running speed was then calculated by dividing this distance by the recorded time. The average speed (Average_Speed) was obtained after the training ended. Finally, Timer 0 was disabled, and the procedure was completed.
Figure 5B displays the operation procedure for the progressive training mode; namely, constant acceleration training. Timer 0 was initially activated to record the training time, whereas Timers 1 and 2 were employed to detect the IR signals and the latest speed changes, respectively. The software acquired the user-assigned maximum speed and training time from the computer, which were denoted by Max_Speed and Training_Time, respectively. Then, there was a check for whether the rat was in the 0° position. If it was in this position, the running wheel stopped instantly; otherwise, the running wheel continued to accelerate. Timers 0, 1, and 2 were disabled after training, and the procedure was completed.
The operation process for the normal training mode (i.e., formal training) is depicted in Figure 5C. Timers 0 and 1 were initiated to measure the training time and access the IR signals, respectively. The training speed was adjusted by the user on the computer according to the rat’s position. After training, Timers 0 and 1 were disabled, and the procedure was completed.
The software program was equipped with three timer interrupt services. Timer 0 recorded at 1-s intervals and calculated the training time by deducting 1 at each step (Figure 6A). Timer 1 recorded at 0.1-s intervals. It accessed and recorded all IO port and IR signals, cleared the data in the IO port for successive accurate judgments, and transmitted the position data to the computer (Figure 6B). Timer 2 recorded at 1-second intervals and activated the motor according to the constant acceleration obtained by dividing the maximum speed by the training time (Figure 6C).
VERIFICATION OF SYSTEM FUNCTIONS:
The primary function of the system is to detect rat positions, as the position-sensing accuracy affects the overall operation mechanism. Hence, the manual and automatic position-detection functions were verified. In the manual mode, black, opaque pieces of cardboard were applied as masks at each sensing point to assess whether the sensing signals at each point were accurately transmitted to the MCU. In the automatic mode, pieces of cardboard with black marks were glued to the running wheel to mask the signals when the wheel was rotating. The position-sensing accuracy of each point was tested at speeds of 0.1–30 m/min. The results revealed a position sensing accuracy of 100%. Therefore, the implemented infrared-sensing function met the system requirements.
EXPERIMENTAL MODEL OF STROKE IN RATS:
The aim of this study was to rehabilitate rats following stroke by using the training platform. Therefore, rats were subjected to middle cerebral artery occlusion (MCAO) surgery to induce stroke, and the 3-week rehabilitation training program was initiated after 1 week of rest. The process is described as follows.
1) MCAO: Reversible MCAO without craniotomy, as described previously [20], was employed to block the blood flow into the middle cerebral artery (MCA) in rats anesthetized with a mixture of Zoletil (40 mg/kg; Virbac, Nice, France), xylazine hydrochloride (2 mg/kg; Balanzine, Health-Tech Pharmaceutical Co., Taipei, Taiwan), and atropine sulfate (1 mg/kg; Tai Yu Chemical & Pharmaceutical Co. Ltd., Hsinchu, Taiwan) through intraperitoneal injection. Anterior neck incision at the right paramedian line was performed to expose the right common carotid artery (CCA), the external carotid artery, and the internal carotid artery (ICA). A 4-0 monofilament nylon suture (Doccol Corp., Redlands, CA, USA) was advanced from the right CCA bifurcation into the ICA until it blocked the origin of the right MCA (18 mm from the bifurcation of the CCA). After 60 min of transient MCAO, the constricted suture over the CCA was loosened and the filament was removed to allow reperfusion of the brain. In each rat, the surgical incision was closed, and each rat was placed in a warm cage and allowed to awaken. Buprenorphine (0.05 mg/kg, q12-hour subcutaneous dosing for 3 days; Sigma-Aldrich, St. Louis, MO, USA) was used for postoperative analgesia. The overall survival rate at 1 month was approximately 75%. During the first week after surgery, rats were fed wet mashed food from the floor of their cage. Rats were monitored daily to ensure survival and stable body weight. Rats receiving the sham operation were anesthetized using the same reagents; a midline incision was made in the neck and the right CCA was isolated. The surgical incision was then closed, and the rats were allowed to recover from anesthesia. Rats were euthanized 28 days after MCAO.
2) ANIMALS AND GROUPING:
The laboratory animals were male Sprague–Dawley rats with a weight of 250–350 g (BioLASCO Taiwan Co., Ltd.). The rats were housed in an air-conditioned animal facility at 26±0.5°C under a 12-hour light–dark cycle and given unlimited access to water and food. All experiments were conducted during the daytime with the lights on. The experimental procedures were approved by the Animal Ethics Committee of the Chi Mei Medical Center, Taiwan (IACUC approved no. 104-10-A).
The rats were randomly assigned into five groups (i.e., sham, control, treadmill, MRW, and DEARW) and subjected to MCAO surgery accordingly. Each group included eight animals. After 1 week, the rats in the rehabilitation groups (i.e., the treadmill, MRW, and DEARW groups) began a 3-week rehabilitation training program. Rats in the control group did not receive rehabilitation training. Each week, Modified Neurological Severity Scores (mNSSs) [21] were calculated and forelimb foot fault [22] and rotarod tests [23] were employed to evaluate the recovery of motor functions. After 4 weeks, the rats were sacrificed. Their brain lesion volumes [24] and levels of cell damage [25] were assessed using Nissl and hematoxylin-eosin (H&E) staining, respectively.
3) REHABILITATION TRAINING: In the present study, rats that had experienced stroke received effective rehabilitation training using the running wheel system. The training process was divided into adaptation training (i.e., free and progressive training modes) and formal training (i.e., the normal training mode; Figure 7). The behaviors of all rats were analyzed prior to MCAO surgery. Free training was conducted for 2 days after 1 week of rest following the MCAO surgery, and their average speeds were recorded along with their standard deviations (SDs). During the following 3 days, the rats received progressive training for 30 min daily using the maximum speeds recorded during free training. The exercise area of the rats was recorded during this process. In addition, the average speed and exercise area recorded during the free and progressive training stages, respectively, were adopted as a reference for the formal training in the subsequent 2 weeks. The speeds at each position for formal training are explained as follows. Rats were trained at their average speed in the 90° position; their average speed+their SD at the first position to the right of 90°; their average speed – their SD at the first position to the left of 90°; and 0 m/min at the second position to the left of 90° (for protection). The purpose of these settings was to enable the rats to engage in continual movement without interruption within the exercise area. The rats received formal training for 30 min daily, five times per week. For rehabilitation training in the treadmill (with electrical stimulation; Exer-3/6M Treadmill, Columbus Instruments, Columbus, OH, USA) and MRW (without speed protection function) groups, the rats were trained at 10 m/min for 30 min daily for five consecutive days during the first week and 20 m/min for 30 min daily during the second and third weeks [13,26].
STATISTICAL ANALYSIS:
Statistical analyses were performed using GraphPad Prism 7.01 (GraphPad Software Inc., CA, USA). Results are expressed as mean±SD. One-way analysis of variance (ANOVA) with Tukey’s post hoc test was used to analyze the infarction volume, damage score, and Nissl staining data. We performed a two-way ANOVA with Tukey’s multiple comparisons test to analyze behavioral data. If there was a significant difference, a Student’s t-test was used to compare variables for two groups. Results with p<0.05 were considered statistically significant.
Results
MOTOR FUNCTION TEST:
Exercise rehabilitation performance was compared between the groups using mNSSs, the forelimb foot fault test, and the rotarod test (Table 1). The day following MCAO surgery was assigned as Day 0, and the behavior tests were conducted 1 day before surgery and once weekly after surgery (i.e., Days −1, 7, 14, 21, and 28) for comparison (Table 1). The results for the rats in each group were averaged to obtain the group performance. Data were expressed as the mean±SD of independent experiments. The results of the sham group were the highest in Table 1, and they were clearly distinguished from those of the control group, which confirmed the negative effect of MCAO on the motor function of rats. Among the control and rehabilitation groups, the DEARW group exhibited the highest rotarod speed, the longest rotarod duration, the lowest foot-fault error ratio, and the lowest mNSS score on Day 28 (Table 1). Differences between the results of the control, treadmill, and MRW groups were not significant (Table 1), indicating the poor efficacy of treadmill and MRW rehabilitation. However, the results of the DEARW group differed significantly from those of the control group, thus emphasizing the advantage of the proposed system.
CORTISOL LEVEL:
Table 2 shows that the DEARW group exhibited lower cortisol levels than the treadmill group did at all times. In particular, the level of cortisol in the treadmill group remained consistently high throughout the 3-week rehabilitation program, indicating that the electrically stimulated rats were under immense stress. Moreover, the MRW group exhibited higher cortisol levels during Week 2 (0.33 μg/dL) than in Weeks 1 and 3 (0.05 and 0.13 μg/dL, respectively). This was due to the increase in training intensity from Week 1 (10 m/min for 30 min) to Week 2 (20 m/min for 30 min), which was then maintained in Week 3. Accordingly, the MRW group experienced increased stress when the training intensity was raised, although these rats subsequently acclimatized. Additionally, during Week 3, the cortisol levels of the DEARW group (0.08 μg/dL) were lower than those of the MRW group (0.13 μg/dL), although this difference was not significant.
TISSUE PHOTOGRAPHS AND LESION VOLUME:
Lesion volume was determined using Nissl staining. Figure 8A presents the Nissl-stained sections of the cortex and striatum. On each row, the red-framed image (left) was magnified from the full-sized image (center), and the black-framed image was magnified from the full-sized image (right). As illustrated in Figure 8B, the lesion volumes did not differ significantly between the control, treadmill, and MRW groups; however, the lesion volume of the DEARW group (28.2%) was significantly lower than that of the control group (37.9%). DEARW treatment effectively reduced lesion volume, whereas treadmill and MRW treatments did not.
TISSUE PHOTOS AND BRAIN DAMAGE SCORE:
Histopathology was evaluated to quantify the levels of cell damage, using H&E staining. Figure 9A presents the H&E-stained sections. Framed boxes indicate representative areas of the peri-infarct cortex and striatum. The sham group exhibited healthy brain tissue and neuron morphology, whereas MCAO induced severe structural disorganization and moderate levels of pyknotic cells in both the cortex and striatum. As illustrated in Figure 9B and 9C, the damage to the cortex and striatum was reduced in the DEARW group but not in the treadmill or MRW groups. Thus, in terms of damage score, the DEARW group received effective treatment, whereas the treadmill and MRW groups received ineffective treatment.
Discussion
In this study, we developed a DEARW platform for the rehabilitation of rats following stroke. This platform enabled rats to be rehabilitated with low mental stress, and both undertraining and overtraining problems were completely resolved using the individualized training facility. Commercial alternatives that use forced animal training have been designed for disease prevention but not rehabilitation. They have resulted in unsatisfactory efficacy when applied to the rehabilitation of rats. This is because rats were stimulated using an electrical grid at the end of the treadmill [13] or were injured when falling inside a running wheel if they failed to maintain sufficient speed [14]. Hence, a running wheel with an individualized exercise area was developed to address this problem. The exercise area and speed of the running wheel could be dynamically adjusted according to the rat’s physical conditions. This eliminated possibilities of fall injuries. DEARW was observed to provide rats with individualized low-to-moderate training, which benefits their rehabilitation [13–15] and lowers their mental stress. Accordingly, this individualization yields a higher work performance than does a treadmill or a forced-running wheel.
The main difference between running wheels and treadmills is the method of forced training. A running wheel uses a motor to drive the wheel, which in turn forces the rats to run, whereas a treadmill uses electrical stimulation to force running. Electrical stimulation increases cortisol levels, which affects the training results. During MRW training, if the rat cannot keep up with the motor speed, it may be pushed to the upper semicircle of the wheel and then fall [11]. Therefore, an infrared-sensor running wheel (ISRW) was proposed to improve the shortcomings of the MRW [16]. Four IR sensors were installed around the wheel to detect the running position of the rat, thereby preventing the rat from falling [16]. Furthermore, this study further improved the IR sensor mechanism of the ISRW by changing the fixed IR sensor mode to an adjustable IR sensor mode. This mode was mainly used for individual differences during the rehabilitation process. In this study, the proposed DEARW was used to provide a suitable exercise area and speed according to the intensity of the individual’s training. The experimental results of motor function and brain damage demonstrated that this training method provided a favorable rehabilitation effect. Table 3 compares the published platforms.
As displayed in Table 1, the behavioral results on Day 28 did not differ significantly for the control, treadmill, and MRW groups; however, the results indicated that the DEARW group experienced more effective rehabilitation than the other groups, excluding the sham group. That is, DEARW treatment resulted in improved motor function recovery.
Rats in the treadmill group experienced high levels of stress throughout the 3-week rehabilitation program due to the electrical stimulation (Table 2). Therefore, these rats did not become acclimatized to the treadmill during rehabilitation. The MRW group also exhibited increased cortisol levels due to an increase in the training intensity. The cortisol levels of the DEARW group remained low throughout the rehabilitation program, but the differences with the levels in the MRW group were not significant during Weeks 1 and 3. The MRW speed in the first week was 10 m/min, which was an acceptable training option for rehabilitation rats. From the first week to the second week, the speed was changed from 10 to 20 m/min, a noticeable speed change that resulted in a rise in the cortisol level of the MRW group in the second week compared with the first week. During the third week, the speed was also 20 m/min. We believe that after the intensity training of the second week, the rats would have adapted to this intensity; thus the cortisol level declined. Among the three weeks, a relatively high cortisol level was only observed during the second week, which is likely due to the sudden change in training intensity. The rats may have been more stressed at the beginning of this week, and it may have taken some time to adapt, after which time cortisol levels declined.
This study compared the effectiveness of electrically forced treadmill exercise, MRW exercise, and DEARW exercise for similar training intensities. We evaluated functional recovery, neuronal damage, and cortisol levels after brain ischemia was induced in a rat model. Chronic stress increases the sympathetic nervous system tone, which contributes to elevated basal corticosterone and rapid increases in corticosterone levels following subsequent stressor exposure [31]. The typical stress hormone cortisol, secreted from the adrenal cortex, was significantly increased with treadmill rehabilitation with electrical stimulation. Moreover, we found a significantly lower cortisol level during DEARW rehabilitation. Serum cortisol concentrations were significantly increased under forced swimming or treadmill exercise [13,32]. Several clinical and animal studies have demonstrated that the peri-ischemic concentrations of glucocorticoid hormones (i.e., cortisol in humans and corticosterone in rats), are increased during stressful events, thus exacerbating poor stroke outcome [12]. High cortisol levels are associated with increased morbidity and mortality [12]. In rats, an increase in blood corticosterone concentration during or after cerebral ischemia was associated with an increase in infarct volume [12,24]. This may be because neurons in the presence of corticosteroids are more susceptible to subsequent neurologic insults, including impaired capacity to defend against secondary insults after stroke [33].
Some studies have focused on the intensity of exercise. In the short term, blood cortisol level increases if the exercise intensity is above a certain threshold. This threshold increases with endurance training; therefore, at the same absolute exercise intensity, the cortisol response may be lower or may disappear entirely [34]. In long-term stressful situations, voluntary exercise has no significant effect on cortisol levels. Therefore, voluntary exercise may be a method of reducing stress in specific stress situations [32]. In humans, the neuroendocrine hyperactivity phase seems to correspond with the early stage of overtraining. Exercise overtraining results in excessive musculoskeletal loading and hence tissue damage and local and system inflammation. The major inflammatory mediators (such as tumor necrosis factor (TNF)-α and interleukin (IL)-1β) affect the relative hormone secretion of the hypothalamic-pituitary-adrenal (HPA) axis and may further influence the sympathetic nervous system [35]. In the present study, we developed the DEARW, a forced exercise system with a protective infrared sensor for exercise intensity monitoring and automatic adjustment of speed on the basis of fitness. The current results indicate that the DEARW rehabilitation system could contribute to reduced stress hormone (cortisol) levels and higher functional recovery after stroke; therefore, using the DEARW is a more suitable strategy for exercise rehabilitation after stroke than MRW or treadmill.
Nissl and H&E-stained sections were analyzed to evaluate the lesion volume and cell damage in the rats’ brains. As illustrated in Figures 8 and 9, the results of the control group did not differ significantly from those of the treadmill and MRW groups; however, the results for the DEARW group were more satisfactory than those for the control group (Figures 8, 9). This result highlighted the advantages of the developed system.
We have developed several wheel platforms [16–18,36]. The main purpose of these platforms is to replace the electrical stimulation training method of the treadmill. Some studies have suggested that treadmill electrical stimulation has a negative effect [37], reducing the rehabilitation effect to levels even worse than those of the nonexercise group [13,14]. This was also the main reason for our development of the wheel platform. Although a free wheel can induce minimal stress, the effective amount of exercise for each rat is difficult to control because of individual differences. Therefore, our team initially developed a motor to rotate the wheel, which forces the rat to run [36]. This method has a relatively low stress and can effectively control the amount of exercise. Fixed IR sensors were then placed around the wheel to define the effective exercise area of the rat, and a protection mechanism was installed at the boundary (0°) to prevent the rat from entering the upper semicircle and causing an invalid exercise [16–18]. However, during the course of the experiment, the rats were found to have individual differences. Some rats with poor physical fitness did not dare to run at 45° [18]. Thus, we designed an individualized wheel platform and a sensor that can be dynamically adjusted according to individual ability. Accordingly, the physical status of each rat was observed and an appropriate exercise area was established to suit the exercise intensity of each individual. The proposed wheel resulted in very low cortisol levels, proving that this training method is a low-stress training mechanism. The results regarding motor function and neuron damage demonstrated that this low-stress training method can improve rehabilitation. The cortisol levels of the treadmill were the highest in all three weeks of training. Together, the results of cortisol level and neuron damage demonstrated that the low-stress rehabilitation method is superior to the high-stress rehabilitation method.
Similar to humans, rats undergoing rehabilitation after ischemic stroke were physically weaker and less agile than they were before surgery. Hence, overtraining is inevitable if rats with a wide range of physical conditions are rehabilitated at a fixed training intensity. In this study, physically weaker rats were liable to suffer secondary injuries, such as electrical shock and fall injuries. This imposed a high level of stress on the rats and degraded the quality of the exercise rehabilitation. In a previous study, rehabilitated rats have even underperformed compared with their nonrehabilitated counterparts [13,14]. Therefore, a rehabilitation facility with an adjustable exercise area is essential for rats to effectively rehabilitate in low-stress and fall-free environments. In the present study, this was achieved by adopting an individualized exercise area and speed-control mechanism, which was confirmed to provide more satisfactory outcomes than treadmill and conventional running wheel approaches.
Conclusions
The proposed running wheel enables dynamic adjustments of the exercise area and speed based on the rat’s physical fitness. The rats benefited from the exercise rehabilitation platform with individualized exercise areas, as shown by their low stress levels and absence of exercise-related injuries. This research provides an advantage in that the platform can overcome individual differences in training; that is, each individual can have a suitable training intensity to achieve effective rehabilitation. However, compared with real-time image information, information regarding the movements of the rats was difficult to acquire. Detailed information on the movements of the rats is useful for research into exercise posture. Nevertheless, this platform achieved a good rehabilitation effect by individualizing the exercise area. The mNSS, forelimb foot fault, and rotarod tests of the DEARW and control groups differed significantly, indicating that this device is effective for motor function rehabilitation. The results of Nissl and hematoxylin–eosin staining also differed significantly between the DEARW and control groups, suggesting that the designed running wheel is beneficial for rehabilitation following ischemic stroke. These results are expected to serve as the foundation for further research.
Figures
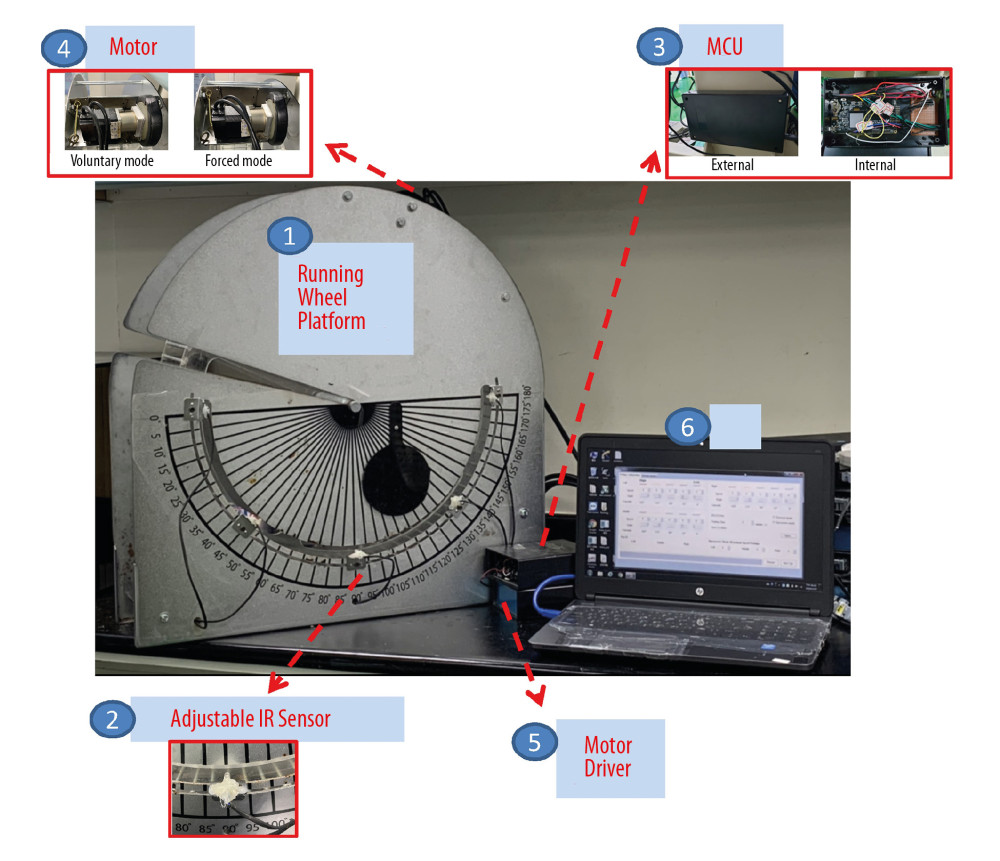 Figure 1. Running wheel platform, including (1) the main body of the running wheel, (2) the adjustable IR sensors, (3) the microcontroller unit, (4) the motors, (5) the motor drivers, and (6) the personal computer.
Figure 1. Running wheel platform, including (1) the main body of the running wheel, (2) the adjustable IR sensors, (3) the microcontroller unit, (4) the motors, (5) the motor drivers, and (6) the personal computer. 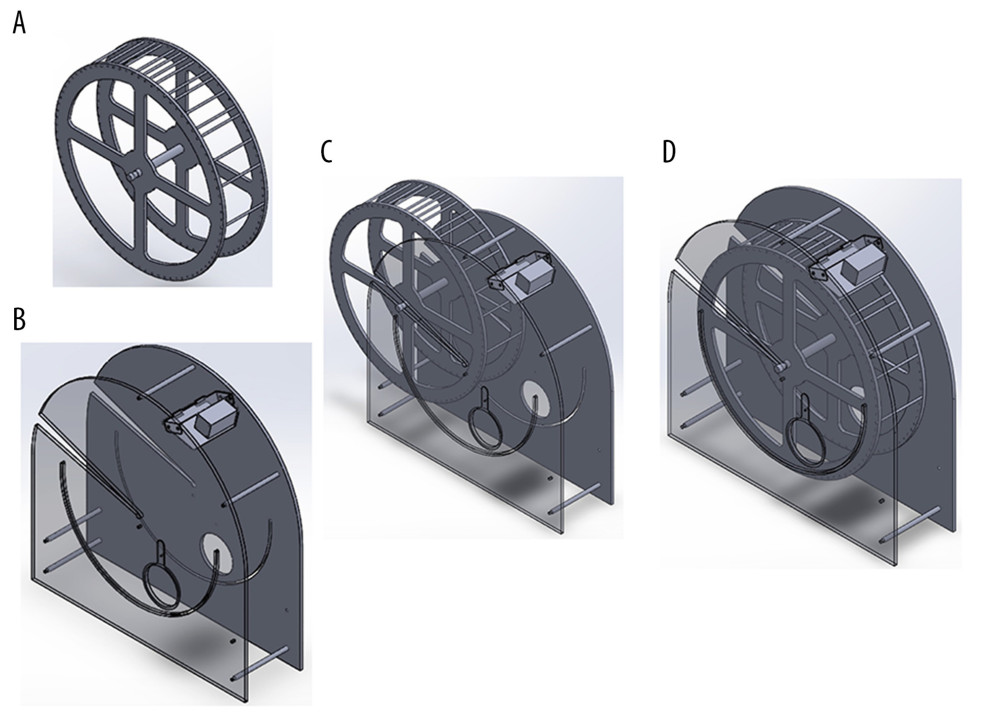 Figure 2. Design of the running wheel platform: (A) The main body of the running wheel comprised two circular, transparent acrylic sheets, iron rods forming the running track, and a center supporting rod. (B) The side plates of the bracing frame comprised two iron sheets and a U-shaped sensing curve. (C) Insertion process of running wheel and side plates. (D) Complete running wheel mechanism.
Figure 2. Design of the running wheel platform: (A) The main body of the running wheel comprised two circular, transparent acrylic sheets, iron rods forming the running track, and a center supporting rod. (B) The side plates of the bracing frame comprised two iron sheets and a U-shaped sensing curve. (C) Insertion process of running wheel and side plates. (D) Complete running wheel mechanism. 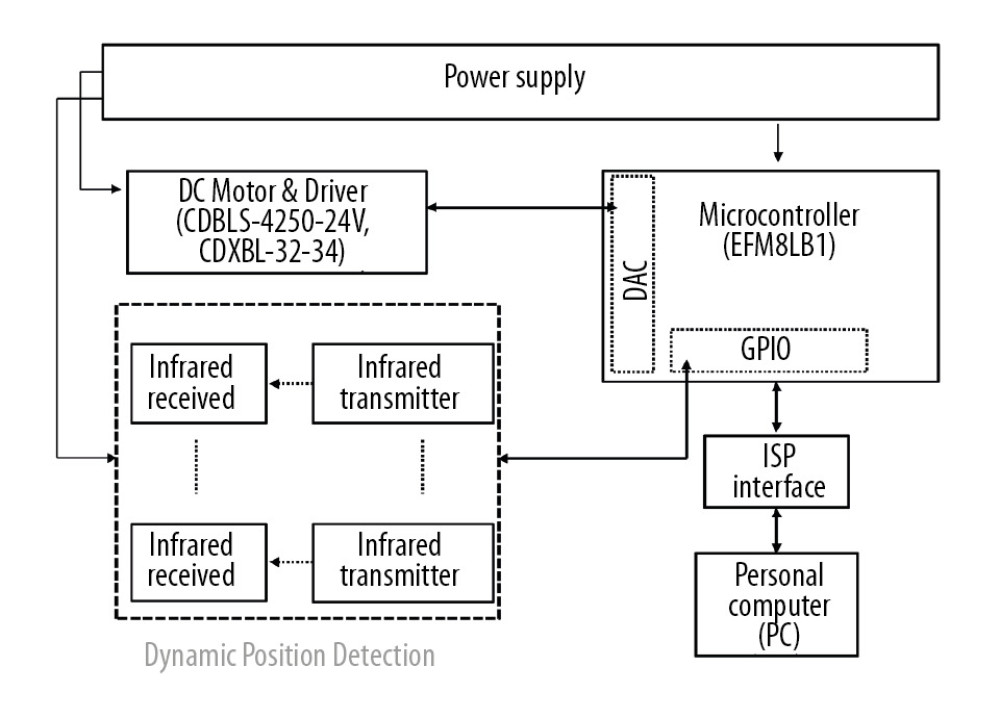 Figure 3. Block diagram of the hardware circuit.
Figure 3. Block diagram of the hardware circuit.  Figure 4. Control-flow diagram for the main program of the running wheel rehabilitation training system.
Figure 4. Control-flow diagram for the main program of the running wheel rehabilitation training system. 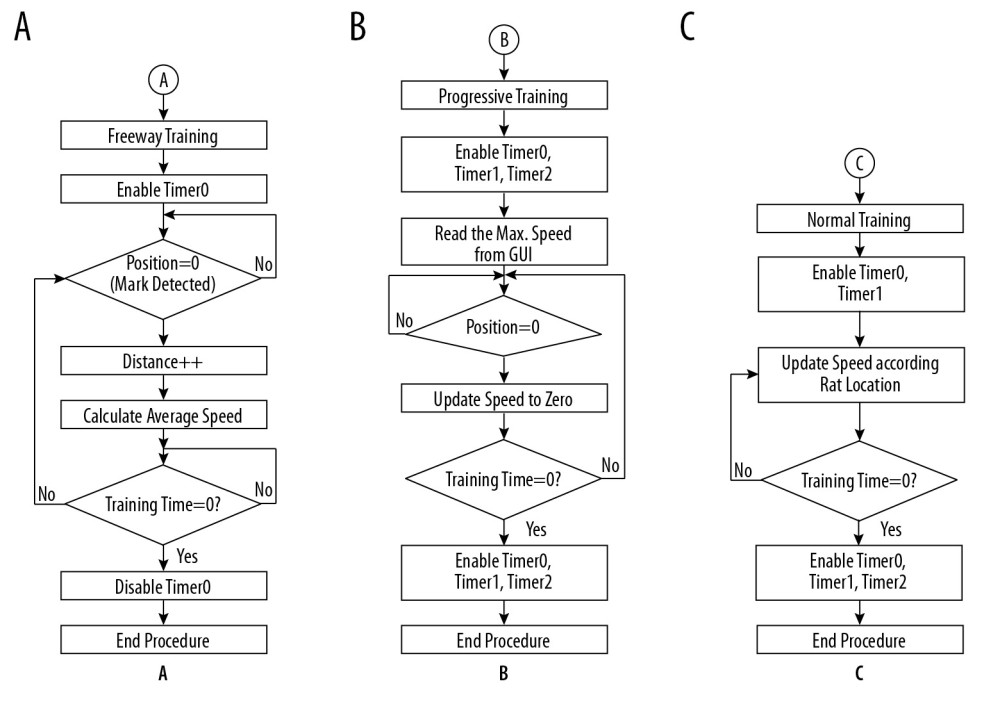 Figure 5. Control-flow diagrams for the (A) free training mode, (B) progressive training mode, and (C) normal training mode.
Figure 5. Control-flow diagrams for the (A) free training mode, (B) progressive training mode, and (C) normal training mode. 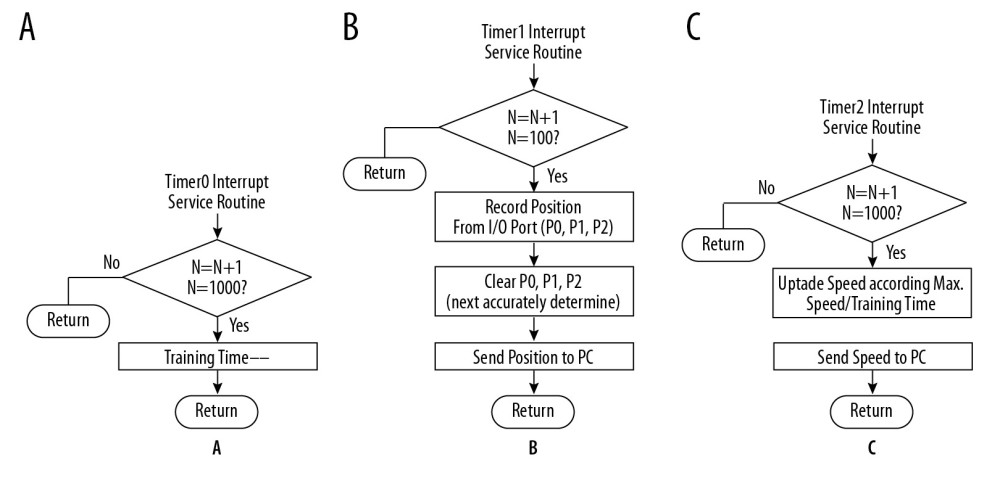 Figure 6. Control-flow diagram for the timer-interrupt services of the running wheel training software. (A) The training time operation routine for Timer 0, (B) the position-sensing operation routine for Timer 1, and (C) the constant acceleration training operation routine for Timer 2.
Figure 6. Control-flow diagram for the timer-interrupt services of the running wheel training software. (A) The training time operation routine for Timer 0, (B) the position-sensing operation routine for Timer 1, and (C) the constant acceleration training operation routine for Timer 2. 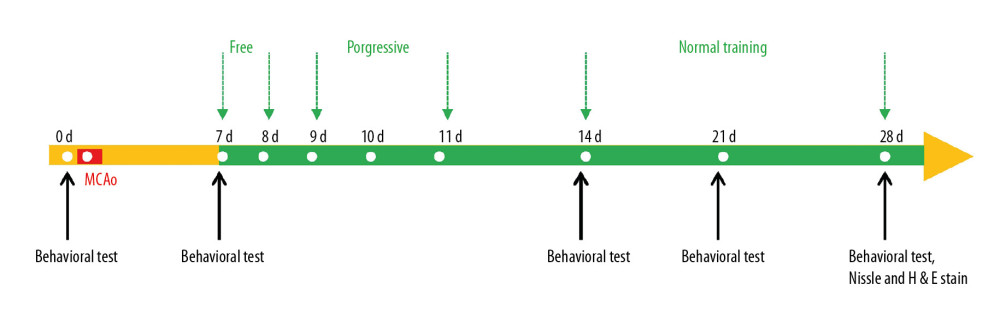 Figure 7. Experimental process for verifying the efficacy of ischemic stroke rehabilitation.
Figure 7. Experimental process for verifying the efficacy of ischemic stroke rehabilitation. 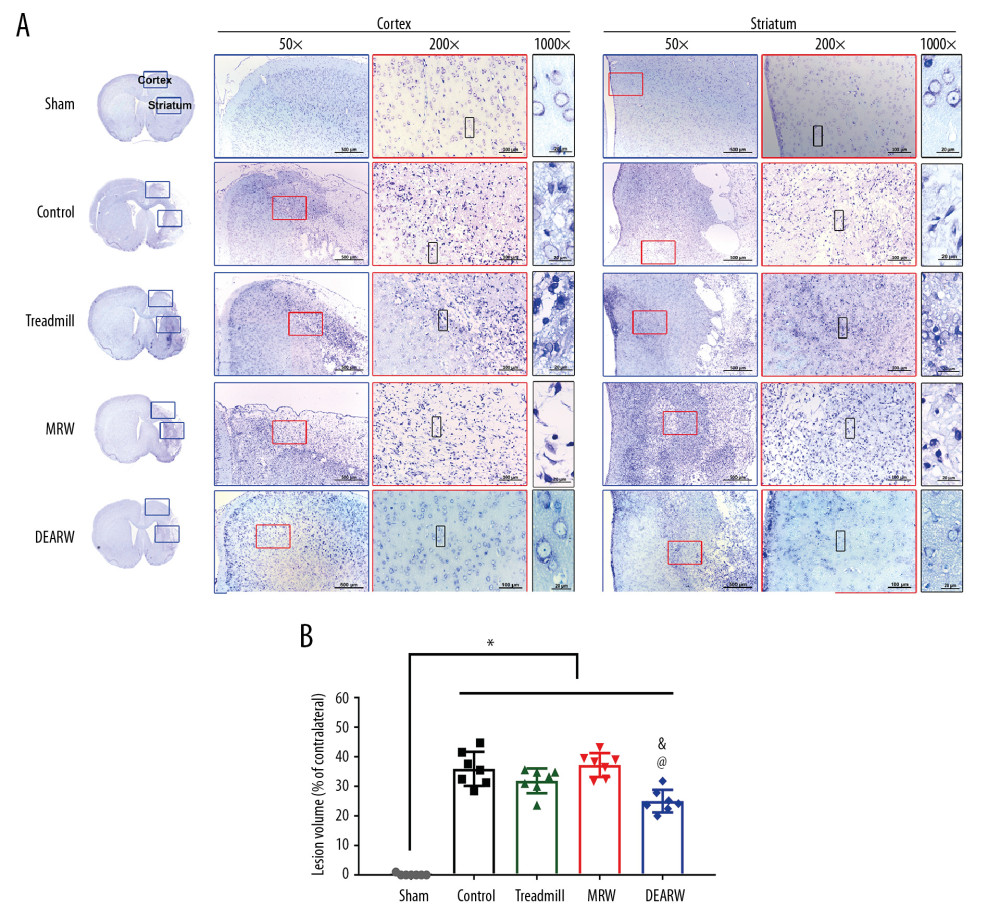 Figure 8. Nissl staining and lesion volumes of the sham group (Sham), middle cerebral artery occlusion (MCAO) control group (Control), MCAO with treadmill rehabilitation group (Treadmill), MCAO with motorized running wheel rehabilitation group (MRW), and MCAO with dynamic exercise area running wheel rehabilitation group (DEARW). (A) Nissl staining of brain tissues at 28 days after middle cerebral artery occlusion. (B) Relative lesion volumes in each group. * p<0.05 compared with the sham group; @ p<0.05 compared with the control group; & p<0.05 compared with the MRW group.
Figure 8. Nissl staining and lesion volumes of the sham group (Sham), middle cerebral artery occlusion (MCAO) control group (Control), MCAO with treadmill rehabilitation group (Treadmill), MCAO with motorized running wheel rehabilitation group (MRW), and MCAO with dynamic exercise area running wheel rehabilitation group (DEARW). (A) Nissl staining of brain tissues at 28 days after middle cerebral artery occlusion. (B) Relative lesion volumes in each group. * p<0.05 compared with the sham group; @ p<0.05 compared with the control group; & p<0.05 compared with the MRW group. 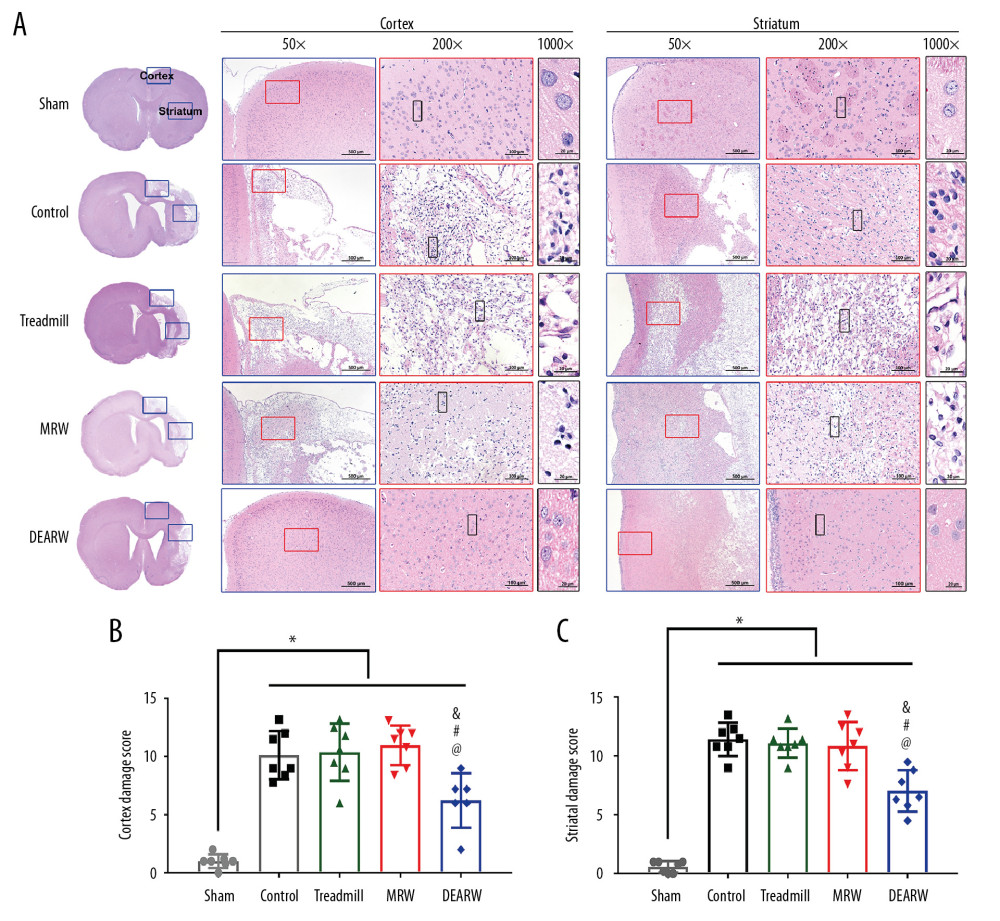 Figure 9. (A) H&E-stained coronal slices illustrating the extent of damage to different parts of the ipsilateral brains of the groups of rats 28 days following middle cerebral artery occlusion (MCAO) or sham surgery. Framed boxes indicate representative areas of peri-infarct cortex and striatum. Sham rats exhibited healthy brain tissue and neuron morphology. MCAO induced severe structural disorganization and moderate levels of pyknotic cells in the cortex and striatum. The dynamic exercise area running wheel (DEARW) treatment attenuated these changes in cell morphology. Brain damage scores in (B) the cortex and (C) the striatum showed that DEARW treatment significantly reduced the cortical and striatal damage scores. Bars represent the means±standard deviations of ten rats. * p<0.05 compared with the sham group; @ p<0.05 compared with the control group; # p<0.05 compared with the treadmill group; & p<0.05 compared with the motorized running wheel group.
Figure 9. (A) H&E-stained coronal slices illustrating the extent of damage to different parts of the ipsilateral brains of the groups of rats 28 days following middle cerebral artery occlusion (MCAO) or sham surgery. Framed boxes indicate representative areas of peri-infarct cortex and striatum. Sham rats exhibited healthy brain tissue and neuron morphology. MCAO induced severe structural disorganization and moderate levels of pyknotic cells in the cortex and striatum. The dynamic exercise area running wheel (DEARW) treatment attenuated these changes in cell morphology. Brain damage scores in (B) the cortex and (C) the striatum showed that DEARW treatment significantly reduced the cortical and striatal damage scores. Bars represent the means±standard deviations of ten rats. * p<0.05 compared with the sham group; @ p<0.05 compared with the control group; # p<0.05 compared with the treadmill group; & p<0.05 compared with the motorized running wheel group. References
1. Duncan PW, Goldstein LB, Horner RD, Similar motor recovery of upper and lower-extremities after stroke: Stroke, 1994; 25(6); 1181-88
2. Mayo NE, Wood-Dauphinee S, Cote R, Activity, participation, and quality of life 6 months poststroke: Arch Phys Med Rehabil, 2002; 83(8); 1035-42
3. Livingston-Thomas J, Nelson P, Karthikeyan S, Exercise and environmental enrichment as enablers of task-specific neuroplasticity and stroke recovery: Neurotherapeutics, 2016; 13(2); 395-402
4. Pin-Barre C, Laurin J, Physical exercise as a diagnostic, rehabilitation, and preventive tool: Influence on neuroplasticity and motor recovery after stroke: Neural Plasticity, 2015; 2015 608581
5. Zheng HQ, Zhang LY, Luo J, Physical exercise promotes recovery of neurological function after ischemic stroke in rats: Int J Mol Sci, 2014; 15(6); 10974-88
6. Auriat AM, Grams JD, Yan RH, Colbourne F, Forced exercise does not improve recovery after hemorrhagic stroke in rats: Brain Res, 2006; 1109; 183-91
7. Leasure JL, Grider M, The effect of mild post-stroke exercise on reactive neurogenesis and recovery of somatosensation in aged rats: Exp Neurol, 2010; 226(1); 58-67
8. Chen CC, Wang YL, Chang CP, Remarkable cell recovery from cerebral ischemia in rats using an adaptive escalator-based rehabilitation mechanism: PLoS One, 2019; 14(10); e0223820
9. Zhao XR, Aronowski J, Liu SJ, Wheel-running modestly promotes functional recovery after a unilateral cortical lesion in rats: Behav Neurol, 2005; 16(1); 41-49
10. Waters RP, Renner KJ, Pringle RB, Selection for aerobic capacity affects corticosterone, monoamines and wheel-running activity: Physiol Behav, 2008; 93(4–5); 1044-54
11. Leasure JL, Jones M, Forced and voluntary exercise differentially affect brain and behavior: Neuroscience, 2008; 156(3); 456-65
12. Hayes K, Sprague S, Guo M, Forced, not voluntary, exercise effectively induces neuroprotection in stroke: Acta Neuropathol, 2008; 115(3); 289-96
13. Ke Z, Yip SP, Li L, The effects of voluntary, involuntary, and forced exercises on brain-derived neurotrophic factor and motor function recovery: A rat brain ischemia model: PLoS One, 2011; 6(2); e16643
14. Ploughman M, Granter-Button S, Chernenko G, Exercise intensity influences the temporal profile of growth factors involved in neuronal plasticity following focal ischemia: Brain Res, 2007; 1150; 207-16
15. Soya H, Nakamura T, Deocaris CC, BDNF induction with mild exercise in the rat hippocampus: Biochem Biophys Res Commun, 2007; 358(4); 961-67
16. Chen C-C, Chang M-W, Chang C-P, Improved infrared-sensing running wheel systems with an effective exercise activity indicator: PLoS One, 2015; 10(4); e0122394
17. Chen CC, Yang CL, Chang CP, An innovative running wheel-based mechanism for improved rat training performance: J Vis Exp, 2016(115); 54354
18. Chen CC, Chang CP, Yang CL, An adaptive fall-free rehabilitation mechanism for ischemic stroke rat patients: Sci Rep, 2019; 9(1); 984
19. Ploughman M, Granter-Button S, Chernenko G, Endurance exercise regimens induce differential effects on brain-derived neurotrophic factor, synapsin-I and insulin-like growth factor I after focal ischemia: Neuroscience, 2005; 136(4); 991-1001
20. Longa EZ, Weinstein PR, Carlson S, Cummins R, Reversible middle cerebral artery occlusion without craniectomy in rats: Stroke, 1989; 20; 84-91
21. Chen JL, Sanberg PR, Li Y, Intravenous administration of human umbilical cord blood reduces behavioral deficits after stroke in rats: Stroke, 2001; 32(11); 2682-88
22. Schaar KL, Brenneman MM, Savitz SI, Functional assessments in the rodent stroke model: Exp Transl Stroke Med, 2010; 2(1); 13
23. Chen JL, Li Y, Wang L, Therapeutic benefit of intravenous administration of bone marrow stromal cells after cerebral ischemia in rats: Stroke, 2001; 32(4); 1005-11
24. Swanson RA, Morton MT, Tsaowu G, A semiautomated method for measuring brain infarct volume: J Cereb Blood Flow Metab, 1990; 10(2); 290-93
25. Honorio JER, Vasconcelos GS, Rodrigues FTS, Monocrotaline: Histological damage and oxidant activity in brain areas of mice: Oxid Med Cell Longev, 2012; 2012 697541
26. Yang YR, Wang RY, Wang PSG, Yu SM, Treadmill training effects on neurological outcome after middle cerebral artery occlusion in rats: Can J Neurol Sci, 2003; 30(3); 252-58
27. Li Y, Chen J, Wang L, Treatment of stroke in rat with intracarotid administration of marrow stromal cells: Neurology, 2001; 56(12); 1666-72
28. Chen J, Zhang C, Jiang H, Atorvastatin induction of VEGF and BDNF promotes brain plasticity after stroke in mice: J Cereb Blood Flow Metab, 2005; 25(2); 281-90
29. Zhang L, Schallert T, Zhang ZG, A test for detecting long-term sensorimotor dysfunction in the mouse after focal cerebral ischemia: J Neurosci Methods, 2002; 117(2); 207-14
30. Tuor UI, Zhao ZH, Barber PA, Qiao M, Recurrent mild cerebral ischemia: Enhanced brain injury following acute compared to subacute recurrence in the rat: BMC Neurosci, 2016; 17(1); 28
31. Lowrance SA, Ionadi A, McKay E, Sympathetic nervous system contributes to enhanced corticosterone levels following chronic stress: Psychoneuroendocrinology, 2016; 68; 163-70
32. Seo H, Park CH, Choi S, Effects of voluntary exercise on apoptosis and cortisol after chronic restraint stress in mice: J Exerc Nutrition Biochem, 2016; 20(3); 16-23
33. Sapolsky RM, Glucocorticoid toxicity in the hippocampus: Reversal by supplementation with brain fuels: J Neurosci, 1986; 6(8); 2240-44
34. Hackney AC, Stress and the neuroendocrine system: The role of exercise as a stressor and modifier of stress: Expert Rev Endocrinol Metab, 2006; 1(6); 783-92
35. Fry AC, Steinacker JM, Meeusen R, Endocrinology of overtraining: The Endocrine System in Sports and Exercise, 2005; 578-99
36. Chen CC, Chang MW, Chang CP, A forced running wheel system with a microcontroller that provides high-intensity exercise training in an animal ischemic stroke model: Braz J Med Biol Res, 2014; 47(10); 858-68
37. Brown DA, Johnson MS, Armstrong CJ, Short-term treadmill running in the rat: what kind of stressor is it?: J Appl Physiol (1985), 2007; 103(6); 1979-85
Figures
Figure 1. Running wheel platform, including (1) the main body of the running wheel, (2) the adjustable IR sensors, (3) the microcontroller unit, (4) the motors, (5) the motor drivers, and (6) the personal computer.Figure 2. Design of the running wheel platform: (A) The main body of the running wheel comprised two circular, transparent acrylic sheets, iron rods forming the running track, and a center supporting rod. (B) The side plates of the bracing frame comprised two iron sheets and a U-shaped sensing curve. (C) Insertion process of running wheel and side plates. (D) Complete running wheel mechanism.Figure 3. Block diagram of the hardware circuit.Figure 4. Control-flow diagram for the main program of the running wheel rehabilitation training system.Figure 5. Control-flow diagrams for the (A) free training mode, (B) progressive training mode, and (C) normal training mode.Figure 6. Control-flow diagram for the timer-interrupt services of the running wheel training software. (A) The training time operation routine for Timer 0, (B) the position-sensing operation routine for Timer 1, and (C) the constant acceleration training operation routine for Timer 2.Figure 7. Experimental process for verifying the efficacy of ischemic stroke rehabilitation.Figure 8. Nissl staining and lesion volumes of the sham group (Sham), middle cerebral artery occlusion (MCAO) control group (Control), MCAO with treadmill rehabilitation group (Treadmill), MCAO with motorized running wheel rehabilitation group (MRW), and MCAO with dynamic exercise area running wheel rehabilitation group (DEARW). (A) Nissl staining of brain tissues at 28 days after middle cerebral artery occlusion. (B) Relative lesion volumes in each group. * p<0.05 compared with the sham group; @ p<0.05 compared with the control group; & p<0.05 compared with the MRW group.Figure 9. (A) H&E-stained coronal slices illustrating the extent of damage to different parts of the ipsilateral brains of the groups of rats 28 days following middle cerebral artery occlusion (MCAO) or sham surgery. Framed boxes indicate representative areas of peri-infarct cortex and striatum. Sham rats exhibited healthy brain tissue and neuron morphology. MCAO induced severe structural disorganization and moderate levels of pyknotic cells in the cortex and striatum. The dynamic exercise area running wheel (DEARW) treatment attenuated these changes in cell morphology. Brain damage scores in (B) the cortex and (C) the striatum showed that DEARW treatment significantly reduced the cortical and striatal damage scores. Bars represent the means±standard deviations of ten rats. * p<0.05 compared with the sham group; @ p<0.05 compared with the control group; # p<0.05 compared with the treadmill group; & p<0.05 compared with the motorized running wheel group. Tables
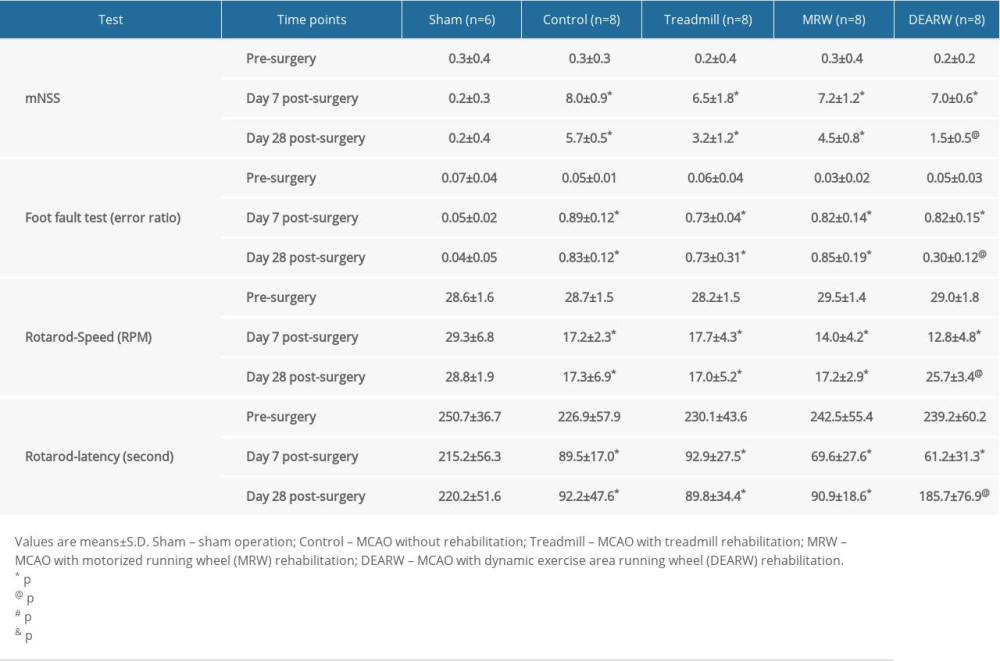 Table 1. Statistical details for behavior tests.
Table 1. Statistical details for behavior tests.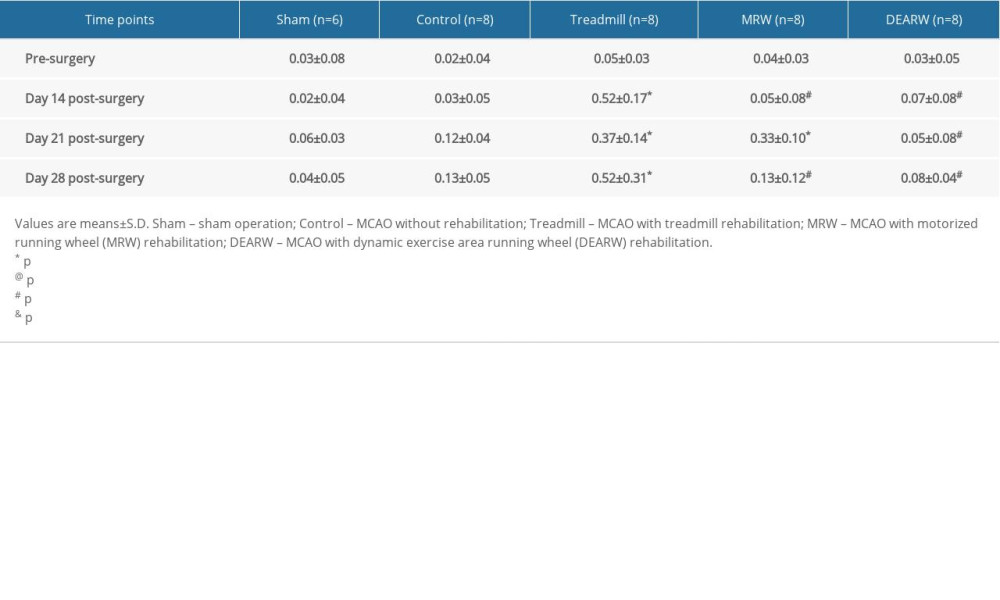 Table 2. Serum cortisol levels.
Table 2. Serum cortisol levels.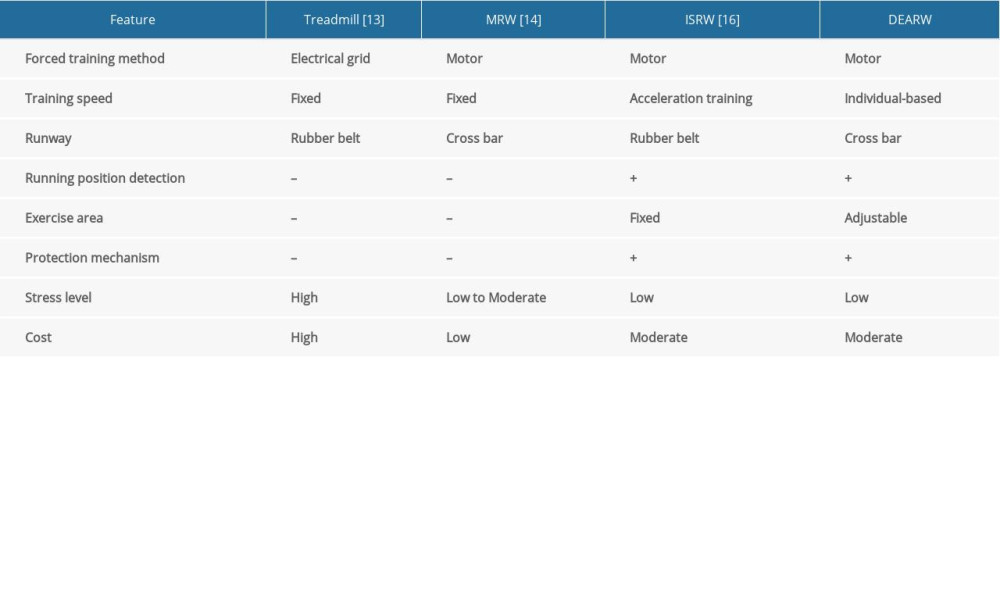 Table 3. The feature comparison among published animal exercise platforms.Table 1. Statistical details for behavior tests.Table 2. Serum cortisol levels.Table 3. The feature comparison among published animal exercise platforms.
Table 3. The feature comparison among published animal exercise platforms.Table 1. Statistical details for behavior tests.Table 2. Serum cortisol levels.Table 3. The feature comparison among published animal exercise platforms. In Press
Clinical Research
Effects of Single-Bout Endurance Exercise Intensity on Peripheral Neurotrophic Factors in Patients With Isc...Med Sci Monit In Press; DOI: 10.12659/MSM.952089
Review article
Anisodus tanguticus in Cancer Research: A Review of Traditional Use, Phytochemistry, Extraction Methods, an...Med Sci Monit In Press; DOI: 10.12659/MSM.952999
Clinical Research
Nasal Mucociliary Clearance and Its Relationship With Disease Severity in Patients With Multiple SclerosisMed Sci Monit In Press; DOI: 10.12659/MSM.952850
Clinical Research
Modified Thoracoabdominal Nerves Block Through the Perichondrial Approach vs Subcostal Transversus Abdomini...Med Sci Monit In Press; DOI: 10.12659/MSM.953976
Most Viewed Current Articles
17 Jan 2024 : Review article 14,176,570
Vaccination Guidelines for Pregnant Women: Addressing COVID-19 and the Omicron VariantDOI :10.12659/MSM.942799
Med Sci Monit 2024; 30:e942799
13 Nov 2021 : Clinical Research 3,762,188
Acceptance of COVID-19 Vaccination and Its Associated Factors Among Cancer Patients Attending the Oncology ...DOI :10.12659/MSM.932788
Med Sci Monit 2021; 27:e932788
14 Dec 2022 : Clinical Research 2,466,310
Prevalence and Variability of Allergen-Specific Immunoglobulin E in Patients with Elevated Tryptase LevelsDOI :10.12659/MSM.937990
Med Sci Monit 2022; 28:e937990
16 May 2023 : Clinical Research 708,927
Electrophysiological Testing for an Auditory Processing Disorder and Reading Performance in 54 School Stude...DOI :10.12659/MSM.940387
Med Sci Monit 2023; 29:e940387